-

BHT/Marti Gasch
01.02.2022„Roboter können uns ganz viel abnehmen“

Ob beim Putzen, in der industriellen Fertigung, im Service oder in der Pflege – Roboter werden zum Teil unseres Alltags. Dr.-Ing. Ivo Boblan, Professor im Studiengang Humanoide Robotik der Berliner Hochschule für Technik, erforscht mit seinem Team am Human.VR.Lab der BHT, wie Mensch und Technik künftig besser miteinander interagieren. Ein Fokus seiner Arbeit: Sich dafür einzusetzen, dass die Menschen ihre technischen Helfer akzeptieren. Welches sind die Voraussetzungen dafür, dass wir mit Robotern kommunizieren? Und wo liegen die Grenzen unserer Akzeptanz? Mehr darüber erzählt der Brain City-Botschafter und Sprecher des Forschungsverbunds „Humanoide Robotik und Mensch-Technik-Interaktion (HARMONIK)“ im Brain City-Interview.
Herr Prof. Dr.-Ing. Boblan. Sie sind einer der bekanntesten Roboterforscher in Deutschland. Was fasziniert Sie an dem Thema?
Ich bin mit Automaten aufgewachsen. Mit Technik, die sich bewegt. Bereits während meiner Schulzeit habe ich gelötet und mechanische Dinge zusammengeschraubt. Ich war fest entschlossen, Robotik zu studieren. Damals hieß das noch Automatisierungstechnik. Die Roboter, mit denen ich es während meines Studiums an der TU Dresden, und später dann an der TU Berlin zu tun hatte, waren noch sehr rudimentär in ihren Funktionen und sehr umständlich zu programmieren. Aber mir war damals – Anfang der 1990er Jahre – schon klar: Das ist die Zukunft.“
Was macht Roboter denn als Forschungsgebiet so spannend?
Roboter können uns ganz viel abnehmen. Sie sind ununterbrochen für uns im Einsatz. Und sie arbeiten viel präziser als wir. Die Technik ist heute natürlich viel ausgereifter als in den 1990ern. Wir beschäftigen uns nicht mehr nur mit Knickarm- oder SCARA-Robotern. Das sind die typischen in der Industrie verwendeten Gelenkarmroboter. Die Forschung geht inzwischen in Richtung menschenähnliche Roboter. Sie haben Ellenbogen-, Schulter-, Knie- und andere Gelenke – und damit auch mehr Freiheitsgrade in der Bewegung. Das Spannende daran ist: Man kann sie über frei verfügbare Software (Open-Source) wie zum Beispiel auf „GitHub“ und in Hochsprachen wie „Python“ programmieren und sie nach den eigenen Wünschen und Vorstellungen steuern und bewegen. Das ist auch für Studierende sehr einfach und schnell zu erlernen. Bei uns am Studiengang Humanoide Robotik arbeiten Studierende bereits ab dem zweiten Semester zusammen mit Doktorandinnen und Doktoranden an einem robotischen Thema.
Roboter nehmen zunehmend Einzug in unseren Alltag: Wo liegen die Herausforderungen in der Entwicklung?
Monotone Tätigkeiten stundenlang auszuführen, ist für uns Menschen weder angenehm noch gesund. Roboter hingegen können das sehr gut. Industrie-Roboter schweißen oder lackieren beispielsweise in der Automobilindustrie seit Jahren sehr zuverlässig und genau. Die Herausforderung liegt jetzt darin, Robotersysteme so weiterzuentwickeln, dass sie den Menschen auch im Alltag, also im Haushalt oder in der Pflege, entlasten. Indem sie etwa Physiotherapeutinnen und Physiotherapeuten durch das Heben und Tragen von Pflegebedürftigen unterstützen. Oder indem sie älteren Menschen schwer zu erreichende Gegenstände wie Tassen aus dem Regal holen. Es geht hier um körperlich belastende Routine-Tätigkeiten. Ganz wichtig ist: Das Reden, Zuhören und andere soziale Interaktionen sollen weiterhin Menschen übernehmen. Grundsätzlich stellt sich allerdings die Frage: Was wollen Menschen in Zukunft noch tun – und welche Tätigkeiten können besser Roboter übernehmen.
In Ihrer Forschung beschäftigen Sie sich auch mit dem Thema „Soft Robotik“: Inwiefern müssen sich die Roboter in ihrem Verhalten dem Menschen anpassen?
Damit Roboter künftig in unseren Alltag Einzug nehmen können, müssen sie in ihren Bewegungen weich und nachgiebig sein. Sie müssen sich unseren Eigenschaften anpassen. Nur dann akzeptieren wir sie; nur dann fühlen wir uns wohl mit ihnen. Die heutigen Industrieroboter bewegen sich noch sehr steif. Das ist uns Menschen fremd, denn in der Natur gibt es nur resiliente Bewegungen. Das heißt konkret: Wir müssen die Roboter der Zukunft in den Antrieben und Gliedmaßen weicher machen. Seit längerer Zeit gibt es auf dem Markt nachgiebige Druckluftantriebe, wie zum Beispiel fluidische Muskeln. Diese sind inhärent nachgiebig und können, wenn man Sie paarig verschaltet, als menschenähnliche Gelenke in Robotersystemen weiche Bewegungen erzeugen. In naher Zukunft werden Roboter so günstig sein, dass fast jeder sie sich leisten kann. Die Frage ist: Werden wir sie auch akzeptieren? Das wird nur geschehen, wenn wir sie so menschenähnlich wie möglich machen. Und damit meine ich nicht, dass sie „humanoid“ aussehen – also Haut, Haare und ein Gesicht haben, sondern dass sie sich „humanoid“ verhalten.


Prof. Dr.-Ing. Ivo Boblan mit seinem Team und Roboter "Digit"
Wie sollten Roboter denn aussehen? Der in Berlin sehr beliebte Roboter „Myon“ aus dem Forschungslabor Neurorobotik Ihres Kollegen Prof. Dr. Manfred Hild hat eine humanoide Gestalt. Steht das nicht im Widerspruch zu dem, was Sie eben gesagt haben?
Ganz und gar nicht. Myon hat zwei Arme, zwei Beine und etwas, das man Kopf nennen kann. Aber er ist klein, kann wenig tragen, hat Elektromotoren in den Gelenken und seine Finger bewegen sich nicht. Er hat auch keine Haut, keine Haare und kein menschliches Gesicht. Er ist auf den ersten Blick als Technik zu erkennen. Wenn ich von humanoiden Robotern spreche, meine ich solche, die man aus der Entfernung für Menschen halten könnte. Wie der vor Kurzem auf der CES 2022 in Las Vegas vorgestellte AMECA AI ROBOT oder „Geminoid HI-1“, der robotische Zwilling von Hiroshi Ishiguro. Wenn Roboter uns zu sehr ähneln, werden sie uns unheimlich. Nach der „Ucanny Valley“ („Unheimliches Tal“)-Hypothese, die der japanische Robotiker Masahiro Mori bereits 1970 aufgestellt hat, sinkt die Akzeptanz beim Menschen mit zunehmender Menschenähnlichkeit des Roboters drastisch und mündet schließlich in einem Grusel-Effekt. Um von uns gruselfrei akzeptiert zu werden, muss ein Roboter nicht einmal einen Kopf haben. Ein Display zur Ansprache könnte ausreichen. Alle diese Fragen sind aber noch so gut wie ungeklärt und können beziehungsweise müssen sogar von den Menschen, die mit Ihnen umgehen wollen, beantwortet werden.
Im Human.VR.Lab der BHT testen Sie Roboter mittels VR/AR und KI in unterschiedlichen Anwendungsbereichen. Welche sind das?
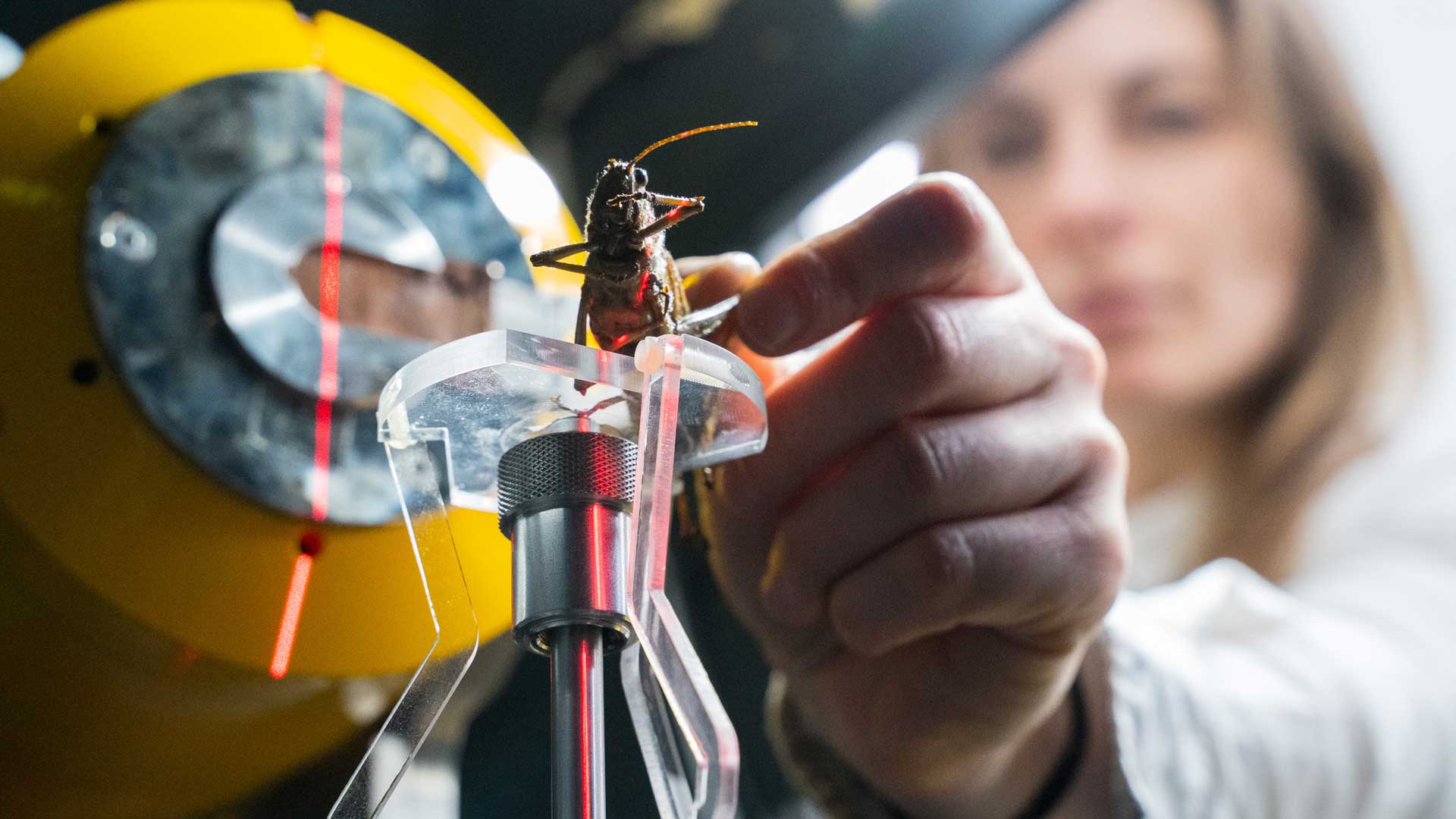
Unser Human.VR.ab ist ein sehr gut ausgestattetes Labor, in dem wir beispielsweise Bewegungsanalysen durchführen können. Das heißt, wir kleben Marker auf die Gelenke von Menschen, um ihre Gelenkbewegungen nachzuverfolgen. Diese Bewegungsmuster übertragen wir dann auf Roboter. So versuchen wir etwa, unseren Roboter Digit „menschlicher“ laufen zu lassen. Per virtueller und erweiterter Realität (VR/AR) können wir ihm außerdem weitere menschliche Merkmale überblenden. Auf diese Weise können wir den Grad der Akzeptanz testen, ohne den gesamten Roboter tatsächlich bauen zu müssen. Das ist deutlich schneller und billiger. Wir werden am Human.VR.Lab auch mit Techniksoziologen zusammenarbeiten, um besser zu verstehen, was die Freude im Umgang mit Robotern erhöhen kann.
Können Sie ein Beispiel nennen?
Wenn ein Roboter uns die Hand um 30 Grad verwinkelt entgegenstreckt, entscheiden wir Menschen spontan, ob wie diese Aktion „reparieren“ oder nicht. Wir nehmen dann entweder die Hand und akzeptieren die Abweichung in der Bewegung – oder auch nicht. Die Frage lautet hier: Bis zu welcher Position beziehungsweise bis zu welcher Abweichung von der Erwartungshaltung fühlt sich der Mensch noch angesprochen und ab wann ignoriert er die ausgestreckte Roboterhand? Und wie müssen wir die Technik verändern, damit Menschen im Umgang mit Robotern möglichst viele Fehler der „noch unzureichenden“ Roboter verzeihen und die Interaktion reparieren? Mit diesem Thema haben wir uns beispielsweise im Rahmen meiner vom BMBF geförderten Nachwuchsforschergruppe MTI-engAge an der TU Berlin beschäftigt.
Im Projekt „EPI“ hingegen befassen Sie sich mit Exoskeletten – also mit äußeren Stützstrukturen für den Menschen, richtig?
Ja genau. In dem vom IFAF Berlin geförderten Projekt, das aktuell noch in der Verlängerung läuft, haben wir zusammen mit der Hochschule für Technik und Wirtschaft Berlin (HTW Berlin) und mehreren Industriepartnern zwei passive Exoskelette nach dem Vorbild des Heuschreckensprungs entwickelt. Diese sollen den Menschen mechanisch dabei unterstützen, schwere Gegenstände zu heben und zu transportieren. Es geht uns dabei nicht darum, den Menschen mit Superman-Fähigkeiten auszustatten. Vielmehr könnten Rückenleiden, Bandscheibenvorfällen, Knieprobleme und auch Ermüdungserscheinungen beim Arbeiten unter hoher körperlicher Belastung reduziert oder Menschen mit Bewegungseinschränkungen mechanisch unterstützt werden. Die im Rahmen des Projekts entwickelten Exoskelette werden aktuell an realen Arbeitsplätzen bei unseren Projektpartnern getestet.
Was ist die Zielsetzung des Forschungsverbunds „Humanoide Robotik und Mensch-Technik-Interaktion (HARMONIK)“ der BHT, dessen Sprecher Sie ja sind?
An der BHT haben wir Ende 2020 zwei Forschungsverbünde ins Leben gerufen: „Data Science +X“ beschäftigt sich unter anderem mit Lernverfahren, Data Mining und Data Quality. Mit HARMONIK möchten wir beispielsweise anhand existierender Robotersysteme die Mensch-Roboter-Interaktion optimieren. Das passiert auf verschiedenen Ebenen. Einerseits untersuchen wir aktuell in einer Bachelorarbeit, wie man intuitiv mit einem Roboter kommunizieren will, etwa um ihm mitzuteilen, dass er doch bitte eine Kiste aufheben soll: Spricht man ihn an, steuert ihn mit einem Joystick oder schaut ihn an und zeigt dabei gleichzeitig auf die Kiste? Andererseits wollen wir, um das Erlebnis Interaktion zu verbessern, die Robotersysteme verändern, ohne sie immer wieder neu kosten- und zeitintensiv entwickeln zu müssen. Das machen wir mittels VR/AR, indem wir – wie bereits erwähnt – die Unzulänglichkeiten der Roboter mit virtuellen Erweiterungen, wie zum Beispiel einem Kopf oder filigranen Händen, überblenden und diese vermischte reale und virtuelle Welt in der Mensch-Roboter-Interaktion testen. Das alles mache ich natürlich nicht allein, sondern in enger Kooperation mit meinen Kollegen Prof. Dr. Kristian Hildebrand, Prof. Dr.-Ing. Joachim Villwock und Prof. Dr.-Ing Hannes Höppner. 15 Professorinnen und Professoren aus den Gesellschaftswissenschaften, den Lebenswissenschaften, der Informatik, der Robotik und dem Maschinenbau arbeiten im Rahmen des Verbunds interdisziplinär zusammen. Data Science +X und HARMONIK forschen und lehren im Human VR_Lab eng verzahnt, um Technik näher an den Menschen zu bringen. Ein weiteres Ziel von HARMONIK ist es, das Human VR-Lab zu verstetigen. Um einen Ort zu schaffen, an dem sämtliche Player hochschulübergreifend an menschzentrierter Technik forschen und lehren können. Ein großer Vorteil von Berlin ist ja: Hier kann man Dinge schnell umsetzen, weil wir nicht entlang alter Leitplanken denken. Und weil es hier viele Menschen gibt, die neue Ideen und Tools aufgreifen und weiterentwickeln.
Der Titel des Lunchtalk #08 der BHT lautete. „Wie kommunizieren Mensch und Roboter in Zukunft?“ Haben Sie darauf eine Antwort?
Es wird immer einen Unterschied geben zwischen der Sensorik der Technik und der des Menschen. Wir haben halt unsere klassischen fünf Sinne; die Technik hat Kamera, Lautsprecher und Mikrofon. Idealerweise werden wir mit der Technik sprechen, weil das am einfachsten ist. Was uns aber emotional ausmacht, ist vor allem das Fühlen und Gefühlt-werden. In naher Zukunft wird es sicherlich auch Tools geben, mit denen wir fühlen und so Nähe über die Distanz bringen können – beispielsweise in Videokonferenzen. Wir werden vermutlich auch über die Distanz riechen können. Das sind emotionale Verbindungen, die wir Menschen brauchen. Wir Forscherinnen und Forscher arbeiten daran, dass Roboter künftig mit sämtlichen menschlichen Sinnen kommunizieren können. (vdo)
Mehr Stories
-
Transfer – Stories Innovationen
 © PTB | Stephanie Rubrecht
Transfer – Stories InnovationenPsychische Gesundheit früher erkennen: Das Einstein Center for Youth Mental Health startet.→
© PTB | Stephanie Rubrecht
Transfer – Stories InnovationenPsychische Gesundheit früher erkennen: Das Einstein Center for Youth Mental Health startet.→Psychische Gesundheit früher erkennen: Das Einstein Center for Youth Mental Health startet
-
Facts & Events Transfer – Stories
 © Retusche: Gabriel_Kienast / Wissenschaft im Dialog, CC BY-SA 4.0
Facts & Events Transfer – StoriesDie MS Wissenschaft geht auf Tour: Medizin der Zukunft auf dem Schiff entdecken.→
© Retusche: Gabriel_Kienast / Wissenschaft im Dialog, CC BY-SA 4.0
Facts & Events Transfer – StoriesDie MS Wissenschaft geht auf Tour: Medizin der Zukunft auf dem Schiff entdecken.→Die MS Wissenschaft geht auf Tour: Medizin der Zukunft auf dem Schiff entdecken
-
Talent Facts & Events Transfer – Stories
 © Ilona Buchem
Talent Facts & Events Transfer – StoriesSozialer Roboter hilft beim Stressabbau: NEFFY 2.0 aus der Brain City Berlin.→
© Ilona Buchem
Talent Facts & Events Transfer – StoriesSozialer Roboter hilft beim Stressabbau: NEFFY 2.0 aus der Brain City Berlin.→Sozialer Roboter hilft beim Stressabbau: NEFFY 2.0 aus der Brain City Berlin
-
Transfer – Stories
 © Christian Kielmann
Transfer – StoriesDas Einstein Center Digital Future: Digitale Transformation gestalten und reflektieren.→
© Christian Kielmann
Transfer – StoriesDas Einstein Center Digital Future: Digitale Transformation gestalten und reflektieren.→Das Einstein Center Digital Future: Digitale Transformation gestalten und reflektieren
-
Facts & Events Transfer – Stories
 © Bayer AG
Facts & Events Transfer – StoriesEin neuer Zukunftsort für Berlin: Das Health Innovation Quarter in Mitte.→
© Bayer AG
Facts & Events Transfer – StoriesEin neuer Zukunftsort für Berlin: Das Health Innovation Quarter in Mitte.→Ein neuer Zukunftsort für Berlin: Das Health Innovation Quarter in Mitte
-
Facts & Events Transfer – Stories
 v.l.n.r.: © GSCN / Arne Sattler © Jenny Evers © GABO © Linda Böse © Charlot van Heeswijk © LakoF Geschäftsstelle © KHSB © Anne Barth ©SPB_Pedro Bacerra
Facts & Events Transfer – StoriesFrauen gestalten Wissenschaft: Perspektiven aus der Berliner Forschungslandschaft zum Weltfrauentag.→
v.l.n.r.: © GSCN / Arne Sattler © Jenny Evers © GABO © Linda Böse © Charlot van Heeswijk © LakoF Geschäftsstelle © KHSB © Anne Barth ©SPB_Pedro Bacerra
Facts & Events Transfer – StoriesFrauen gestalten Wissenschaft: Perspektiven aus der Berliner Forschungslandschaft zum Weltfrauentag.→Frauen gestalten Wissenschaft: Perspektiven aus der Berliner Forschungslandschaft zum Weltfrauentag
-
Insights Transfer – Stories
 © Nikolaus Brade
Insights Transfer – StoriesMit dem Projekt „Multisensory in Dialogue and Artistic Practice“ setzen die UdK Berlin und die Folkwang ein starkes Zeichen für die Zukunft der…→
© Nikolaus Brade
Insights Transfer – StoriesMit dem Projekt „Multisensory in Dialogue and Artistic Practice“ setzen die UdK Berlin und die Folkwang ein starkes Zeichen für die Zukunft der…→Gemeinsames Potenzial entfalten
-
Transfer – Stories
 © shutterstock/ Studio Romantic
Transfer – StoriesKönnen pflegebedürftige Menschen durch gezielte Bewegung wieder selbständiger werden? Das hat Brain City Botschafter Prof. Dr. Uwe Bettig im Projekt…→
© shutterstock/ Studio Romantic
Transfer – StoriesKönnen pflegebedürftige Menschen durch gezielte Bewegung wieder selbständiger werden? Das hat Brain City Botschafter Prof. Dr. Uwe Bettig im Projekt…→Wieder fit für daheim
-
Facts & Events Transfer – Stories
 © Agentur Medienlabor / Stefan Schubert
Facts & Events Transfer – StoriesFünf Unternehmen aus der Hauptstadtregion wurden für ihre visionären Ideen und Produkte ausgezeichnet, ein weiteres erhielt den Sonderpreis.→
© Agentur Medienlabor / Stefan Schubert
Facts & Events Transfer – StoriesFünf Unternehmen aus der Hauptstadtregion wurden für ihre visionären Ideen und Produkte ausgezeichnet, ein weiteres erhielt den Sonderpreis.→Innovationspreis Berlin Brandenburg 2025 – die Gewinner
-
Insights Transfer – Stories
 © TU Berlin/Felix Noak
Insights Transfer – StoriesProf. Dr. Giuseppe Caire forscht an der TU Berlin an einer neuen Übertragungsmethode, die drahtlose Kommunikation revolutionieren könnte.→
© TU Berlin/Felix Noak
Insights Transfer – StoriesProf. Dr. Giuseppe Caire forscht an der TU Berlin an einer neuen Übertragungsmethode, die drahtlose Kommunikation revolutionieren könnte.→Drahtlose Kommunikation völlig neu gedacht
-
Insights Transfer – Stories
 © HTW Berlin/Alexander Rentsch
Insights Transfer – StoriesIm Januar 2025 ist die European University Alliance EUonAIR an den Start gegangen. Mehr über den einzigartigen Hochschulverbund erzählt Brain City…→
© HTW Berlin/Alexander Rentsch
Insights Transfer – StoriesIm Januar 2025 ist die European University Alliance EUonAIR an den Start gegangen. Mehr über den einzigartigen Hochschulverbund erzählt Brain City…→„Wir müssen das Rad nicht neu erfinden“
-
Facts & Events Transfer – Stories
 © Christian Kielmann
Facts & Events Transfer – StoriesAuf dem Campus der TU Berlin entsteht die europaweit größte Laborinfrastruktur für Transferteams im Bereich der Grünen Chemie. Die „Chemical Invention…→
© Christian Kielmann
Facts & Events Transfer – StoriesAuf dem Campus der TU Berlin entsteht die europaweit größte Laborinfrastruktur für Transferteams im Bereich der Grünen Chemie. Die „Chemical Invention…→Spatenstich für „Chemical Invention Factory“
-
Facts & Events Transfer – Stories
 © Tu Berlin / allefarben-foto
Facts & Events Transfer – StoriesDrohnen-Logistik, Baustoff-Recycling und Wiederverwendung von Abwasser: Diese drei Ideen sollen in den kommenden drei Jahren in Reallaboren praxisnah…→
© Tu Berlin / allefarben-foto
Facts & Events Transfer – StoriesDrohnen-Logistik, Baustoff-Recycling und Wiederverwendung von Abwasser: Diese drei Ideen sollen in den kommenden drei Jahren in Reallaboren praxisnah…→Drei Berliner Reallabore gehen an den Start
-
Facts & Events Transfer – Stories
 © Stefan Klenke / HU Berlin
Facts & Events Transfer – StoriesDer Berliner Batterieforscher Prof. Dr. Philipp Adelhelm ist mit dem Wissenschaftspreis 2024 des Regierenden Bürgermeisters von Berlin ausgezeichnet…→
© Stefan Klenke / HU Berlin
Facts & Events Transfer – StoriesDer Berliner Batterieforscher Prof. Dr. Philipp Adelhelm ist mit dem Wissenschaftspreis 2024 des Regierenden Bürgermeisters von Berlin ausgezeichnet…→Berliner Wissenschaftspreis für Prof. Dr. Philipp Adelhelm
-
Insights Transfer – Stories
 © Gorodenkoff / Shutterstock.com
Insights Transfer – StoriesBrain City Interview: Prof. Dr. Petra Ritter, Koordinatorin des Projekts TEF-Health erzählt mehr über die länderübergreifende Test- und…→
© Gorodenkoff / Shutterstock.com
Insights Transfer – StoriesBrain City Interview: Prof. Dr. Petra Ritter, Koordinatorin des Projekts TEF-Health erzählt mehr über die länderübergreifende Test- und…→Europäische Testinfrastruktur für KI im Gesundheitswesen
-
Insights Transfer – Stories
 © HTW Berlin/Alexander Rentsch
Insights Transfer – StoriesDie KI-Werkstatt der HTW Berlin bündelt die Kompetenzen der Hochschule interdisziplinär, um den Einsatz von KI praxisnah zu erforschen.→
© HTW Berlin/Alexander Rentsch
Insights Transfer – StoriesDie KI-Werkstatt der HTW Berlin bündelt die Kompetenzen der Hochschule interdisziplinär, um den Einsatz von KI praxisnah zu erforschen.→Generative KI in Forschung und Lehre stärken
-
Facts & Events Transfer – Stories
") © DLR (CC BY-NC-ND 3.0)
Facts & Events Transfer – StoriesMit dem Anfang Mai gegründeten Institut bündelt das Deutsche Zentrum für Luft- und Raumfahrt in Berlin Adlershof seine Expertise auf dem Gebiet der…→
© DLR (CC BY-NC-ND 3.0)
Facts & Events Transfer – StoriesMit dem Anfang Mai gegründeten Institut bündelt das Deutsche Zentrum für Luft- und Raumfahrt in Berlin Adlershof seine Expertise auf dem Gebiet der…→Neues DLR-Institut für Weltraumforschung
-
Startup Transfer – Stories
 © theion
Startup Transfer – StoriesDas Start-up theion will in der Brain City Berlin mit einer neuen Technologie den Batteriemarkt revolutionieren und die Energiewende beschleunigen.→
© theion
Startup Transfer – StoriesDas Start-up theion will in der Brain City Berlin mit einer neuen Technologie den Batteriemarkt revolutionieren und die Energiewende beschleunigen.→„Batterien made in Germany, made in Berlin”
-
Insights Transfer – Stories
 © Berlin University Alliance / Stefan Klenke
Insights Transfer – StoriesMit dem innovate! lab will die Berlin University Alliance Spitzenforschung schnell und zielgerichtet in die Praxis bringen. BUA-Geschäftsführerin Dr.…→
© Berlin University Alliance / Stefan Klenke
Insights Transfer – StoriesMit dem innovate! lab will die Berlin University Alliance Spitzenforschung schnell und zielgerichtet in die Praxis bringen. BUA-Geschäftsführerin Dr.…→„Forschungstransfer durch Agilität“
-
Facts & Events Transfer – Stories
 © Berlin Partner / eventfotografen.berlin
Facts & Events Transfer – StoriesAnfang März haben insgesamt 19 Universitäten, Hochschulen und außeruniversitäre Forschungseinrichtungen die Satzung von UNITE Sciences e.V.…→
© Berlin Partner / eventfotografen.berlin
Facts & Events Transfer – StoriesAnfang März haben insgesamt 19 Universitäten, Hochschulen und außeruniversitäre Forschungseinrichtungen die Satzung von UNITE Sciences e.V.…→UNITE Sciences: Technologietransfer beschleunigen
-
Facts & Events Transfer – Stories
 © IHK Berlin
Facts & Events Transfer – StoriesHochschulausgründungen und Innovationen wollen TU Berlin und IHK Berlin künftig gemeinsam stärker voranbringen. Eine entsprechende Vereinbarung wurde…→
© IHK Berlin
Facts & Events Transfer – StoriesHochschulausgründungen und Innovationen wollen TU Berlin und IHK Berlin künftig gemeinsam stärker voranbringen. Eine entsprechende Vereinbarung wurde…→Kooperation zwischen TU Berlin und IHK Berlin
-
Insights Transfer – Stories
 © BettaF!sh/Valentin Pellio
Insights Transfer – StoriesDas Start-up BettaF!sh entwickelt und produziert in der Brain City Berlin die weltweit ersten authentischen Fischalternativen auf Meeresalgenbasis.→
© BettaF!sh/Valentin Pellio
Insights Transfer – StoriesDas Start-up BettaF!sh entwickelt und produziert in der Brain City Berlin die weltweit ersten authentischen Fischalternativen auf Meeresalgenbasis.→„Mit allem, was wir tun, betreten wir Neuland“
-
Insights Transfer – Stories
 © Berlin Partner/Eventfotografen
Insights Transfer – StoriesDie Forschungslandschaft in Berlin und Brandenburg ist hervorragend, aber recht fragmentiert. Das Konsortium UNITE will das ändern.→
© Berlin Partner/Eventfotografen
Insights Transfer – StoriesDie Forschungslandschaft in Berlin und Brandenburg ist hervorragend, aber recht fragmentiert. Das Konsortium UNITE will das ändern.→UNITE: Synergien fördern, Innovationen beschleunigen
-
Facts & Events Transfer – Stories
 © Berlin Partner
Facts & Events Transfer – StoriesAuf der vierten Transfer Week Berlin-Brandenburg vom 25. bis zum 29. November geht um neueste Entwicklungen im regionalen Transfergeschehen. 62…→
© Berlin Partner
Facts & Events Transfer – StoriesAuf der vierten Transfer Week Berlin-Brandenburg vom 25. bis zum 29. November geht um neueste Entwicklungen im regionalen Transfergeschehen. 62…→Zukunft des Wissenstransfers: Transfer Week 2024
-
Insights Transfer – Stories
 CCC © Michael Reinhardt
Insights Transfer – StoriesIm Brain City Interview: Dr. Anita Dame, Geschäftsführerin des Climate Change Center Berlin Brandenburg.→
CCC © Michael Reinhardt
Insights Transfer – StoriesIm Brain City Interview: Dr. Anita Dame, Geschäftsführerin des Climate Change Center Berlin Brandenburg.→„Klimatransformation ist ein Marathon“
-
Facts & Events Transfer – Stories
 © CeRRI 2024
Facts & Events Transfer – StoriesTransferaktivitäten und Forschung konkurrieren nicht miteinander. Im Gegenteil! Das ist ein Kernergebnis der Studie „Transfer 1000“ von TU Berlin und…→
© CeRRI 2024
Facts & Events Transfer – StoriesTransferaktivitäten und Forschung konkurrieren nicht miteinander. Im Gegenteil! Das ist ein Kernergebnis der Studie „Transfer 1000“ von TU Berlin und…→„Transfer 1000“: Studie zum Wissenschaftstransfer
-
Insights Transfer – Stories
 © edelviz
Insights Transfer – StoriesBrain City Interview mit Lia Carlucci, Geschäftsführin des Food Campus Berlin. Sie erzählt mehr über den aktuellen Stand des Projekts – und erläutert,…→
© edelviz
Insights Transfer – StoriesBrain City Interview mit Lia Carlucci, Geschäftsführin des Food Campus Berlin. Sie erzählt mehr über den aktuellen Stand des Projekts – und erläutert,…→„Kollaboration statt Wettbewerb“
-
Facts & Events Transfer – Stories
 © HTW/ZfS
Facts & Events Transfer – StoriesKlima, Gesundheit und Nachhaltigkeit – das sind die Kernthemen der Transferale. Vom 25. bis zum 27. September findet das Wissenschafts- und…→
© HTW/ZfS
Facts & Events Transfer – StoriesKlima, Gesundheit und Nachhaltigkeit – das sind die Kernthemen der Transferale. Vom 25. bis zum 27. September findet das Wissenschafts- und…→Ideen für Berlins Zukunft
-
Startup Transfer – Stories
 © STOFF2/Kerstin Reisch
Startup Transfer – StoriesDas Berliner Start-up STOFF2 will die „Zink-Zwischenschritt-Elektrolyse“ (ZZE) zur Marktreife bringen und arbeitet dabei auch eng mit der Technischen…→
© STOFF2/Kerstin Reisch
Startup Transfer – StoriesDas Berliner Start-up STOFF2 will die „Zink-Zwischenschritt-Elektrolyse“ (ZZE) zur Marktreife bringen und arbeitet dabei auch eng mit der Technischen…→Der kleine, feine Zwischenschritt
-
Insights Transfer – Stories
 © WISTA Management GmbH – www.adlershof.de
Insights Transfer – StoriesDer Wissenschafts- und Technologiepark Adlershof ist der größte der insgesamt elf Berliner Zukunftsorte. Die enge Verbindung zwischen Wissenschaft und…→
© WISTA Management GmbH – www.adlershof.de
Insights Transfer – StoriesDer Wissenschafts- und Technologiepark Adlershof ist der größte der insgesamt elf Berliner Zukunftsorte. Die enge Verbindung zwischen Wissenschaft und…→„Wir leben von der Nähe und dem Austausch“
-
Insights Transfer – Stories
 © Berlin Partner
Insights Transfer – StoriesDas Cluster „Additive Manufacturing Berlin Brandenburg“ will den Transfer von Ergebnissen aus der Spitzenforschung in international wettbewerbsfähige…→
© Berlin Partner
Insights Transfer – StoriesDas Cluster „Additive Manufacturing Berlin Brandenburg“ will den Transfer von Ergebnissen aus der Spitzenforschung in international wettbewerbsfähige…→AMBER: Vernetzung von Spitzenforschung und Industrie
-
Insights Transfer – Stories
 © Kai Müller Photography
Insights Transfer – StoriesEin Zeitungsinterview gab den Anstoß zur Gründung des Start-ups. Mehr erzählt airpuls-Gründer Prof. Dr.-Ing. habil. Slawomir Stanczak im Brain…→
© Kai Müller Photography
Insights Transfer – StoriesEin Zeitungsinterview gab den Anstoß zur Gründung des Start-ups. Mehr erzählt airpuls-Gründer Prof. Dr.-Ing. habil. Slawomir Stanczak im Brain…→airpuls: 5-G-Lösungen aus der Forschung
-
Insights Transfer – Stories
 Shutterstock © optimarc
Insights Transfer – StoriesMit einem neuen Transferzertifikat bescheinigt die TU Berlin Studierenden, die sich mit Methoden und Fragestellungen des Wissens- und…→
Shutterstock © optimarc
Insights Transfer – StoriesMit einem neuen Transferzertifikat bescheinigt die TU Berlin Studierenden, die sich mit Methoden und Fragestellungen des Wissens- und…→Blick über den Tellerrand hinaus
-
Insights Transfer – Stories Innovationen
 © Berlin Partner
Insights Transfer – Stories InnovationenQuantentechnologie gilt als der nächste große Technologiesprung. Die Brain City Berlin bietet dafür ideale Voraussetzungen.→
© Berlin Partner
Insights Transfer – Stories InnovationenQuantentechnologie gilt als der nächste große Technologiesprung. Die Brain City Berlin bietet dafür ideale Voraussetzungen.→BERLIN QUANTUM: neue Initiative für Quantentechnologien
-
Insights Transfer – Stories
 Design © Sarah Engler; Foto © Alexander Bob
Insights Transfer – StoriesBrain City-Interview mit Prof. Dr. Uwe Bettig. Als Professor für Management und Betriebswirtschaft an der ASH Berlin leitet er das IFAF-Projekt…→
Design © Sarah Engler; Foto © Alexander Bob
Insights Transfer – StoriesBrain City-Interview mit Prof. Dr. Uwe Bettig. Als Professor für Management und Betriebswirtschaft an der ASH Berlin leitet er das IFAF-Projekt…→Viele kreative Ideen und Ansätze
-
Insights Transfer – Stories
 © Ivar Veermae
Insights Transfer – StoriesAm Coworking Space EINS in Berlin-Charlottenburg fördert die TU Berlin Start-ups, die den globalen Herausforderungen gleich dreifach nachhaltig…→
© Ivar Veermae
Insights Transfer – StoriesAm Coworking Space EINS in Berlin-Charlottenburg fördert die TU Berlin Start-ups, die den globalen Herausforderungen gleich dreifach nachhaltig…→Ökonomisch, ökologisch, sozial
-
Facts & Events Transfer – Stories
 TU Berlin © Felix Noak
Facts & Events Transfer – StoriesNoch bis zum 29. April können interdisziplinäre Forschungsteams Proposals für die Next Grand Challenge der Berlin University Alliance einreichen.→
TU Berlin © Felix Noak
Facts & Events Transfer – StoriesNoch bis zum 29. April können interdisziplinäre Forschungsteams Proposals für die Next Grand Challenge der Berlin University Alliance einreichen.→Next Grand Challenge: jetzt bewerben!
-
Facts & Events Transfer – Stories
") © Alfred-Wegener-Institut/Micheal Gutsche (CC-BY 4.0)
Facts & Events Transfer – StoriesEine Sonderausstellung im Deutschen Technikmuseum macht eiswürfelklar: Es bleibt nur noch wenig Zeit, um die Arktis zu retten.→
© Alfred-Wegener-Institut/Micheal Gutsche (CC-BY 4.0)
Facts & Events Transfer – StoriesEine Sonderausstellung im Deutschen Technikmuseum macht eiswürfelklar: Es bleibt nur noch wenig Zeit, um die Arktis zu retten.→Ausstellungstipp: „Dünnes Eis“
-
Insights Transfer – Stories
 © Zukunftsorte Berlin
Insights Transfer – StoriesInterview mit Brain City Botschafter Steffen Terberl, Leiter der Geschäftsstelle Zukunftsorte.→
© Zukunftsorte Berlin
Insights Transfer – StoriesInterview mit Brain City Botschafter Steffen Terberl, Leiter der Geschäftsstelle Zukunftsorte.→„Damit in Berlin wieder Innovationsgeschichte geschrieben werden kann“
-
Insights Transfer – Stories
 © BHT-MINT-VR-Labs
Insights Transfer – StoriesIn den MINT-VR-Labs an der Berliner Hochschule für Technik arbeitet ein interdisziplinäres Team an didaktischen Konzepten für virtuelle Labore und…→
© BHT-MINT-VR-Labs
Insights Transfer – StoriesIn den MINT-VR-Labs an der Berliner Hochschule für Technik arbeitet ein interdisziplinäres Team an didaktischen Konzepten für virtuelle Labore und…→Spielerisch lernen im virtuellen Biolabor
-
Facts & Events Transfer – Stories
© BPWT
Facts & Events Transfer – StoriesMit einer ganztägigen Auftaktkonferenz in den stilwerk KantGaragen geht die Transfer Week Berlin-Brandenburg 2023 an den Start.→
„Wissenschaft x Wirtschaft“: Transfer Week 2023
-
Insights Transfer – Stories
 © edelVIZ
Insights Transfer – StoriesAb 2024 soll im Berliner Industriegebiet Tempelhof-Ost der Food Campus Berlin entstehen. Ein Science Park mit den Schwerpunkten Ernährung und…→
© edelVIZ
Insights Transfer – StoriesAb 2024 soll im Berliner Industriegebiet Tempelhof-Ost der Food Campus Berlin entstehen. Ein Science Park mit den Schwerpunkten Ernährung und…→Think Tank für die Ernährung der Zukunft
-
Insights Transfer – Stories
 © Berlin Partner/Wüstenhagen
Insights Transfer – StoriesIm Mittelpunkt stehen der Wissenschaftsstandort, der für Berlin charakteristische Wissenschafts- und Technologietransfer – und natürlich die Brain…→
© Berlin Partner/Wüstenhagen
Insights Transfer – StoriesIm Mittelpunkt stehen der Wissenschaftsstandort, der für Berlin charakteristische Wissenschafts- und Technologietransfer – und natürlich die Brain…→Brain City Berlin launcht neue Kampagnenmotive
-
Facts & Events Transfer – Stories
 © Falling Walls Foundation
Facts & Events Transfer – StoriesVom 1. bis zum 10. November ist wieder Berlin Science Week. Neu in diesem Jahr: Das ART & SCIENCE FORUM im Holzmarkt 25 ist neben dem CAMPUS im…→
© Falling Walls Foundation
Facts & Events Transfer – StoriesVom 1. bis zum 10. November ist wieder Berlin Science Week. Neu in diesem Jahr: Das ART & SCIENCE FORUM im Holzmarkt 25 ist neben dem CAMPUS im…→Mit Fokus auf Kunst & Wissenschaft: Berlin Science Week 2023
-
Facts & Events Transfer – Stories
 © Peter Himsel/Campus Berlin-Buch GmbH
Facts & Events Transfer – StoriesDie Brain City Berlin hat ein neues Gründerzentrum: Der BerlinBioCube auf dem Campus Berlin-Buch umfasst 8.000 Quadratmeter moderne Labor- und…→
© Peter Himsel/Campus Berlin-Buch GmbH
Facts & Events Transfer – StoriesDie Brain City Berlin hat ein neues Gründerzentrum: Der BerlinBioCube auf dem Campus Berlin-Buch umfasst 8.000 Quadratmeter moderne Labor- und…→BerlinBioCube eröffnet
-
Insights Transfer – Stories
 © Gisma
Insights Transfer – StoriesSeit 2017 sitzt die Gisma University of Applied Sciences mit einem Campus in der Brain City Berlin. Mehr als 660 Studierende aus aller Welt werden an…→
© Gisma
Insights Transfer – StoriesSeit 2017 sitzt die Gisma University of Applied Sciences mit einem Campus in der Brain City Berlin. Mehr als 660 Studierende aus aller Welt werden an…→Praxisorientiert studieren und der Wirtschaft Impulse geben
-
Facts & Events Transfer – Stories
 © HU Berlin
Facts & Events Transfer – StoriesDie App „TRAIN 4 Science“ regt Kinder, aber auch Erwachsene spielerisch dazu an, sich mit dem Klimawandel auseinanderzusetzen. Konzipiert und…→
© HU Berlin
Facts & Events Transfer – StoriesDie App „TRAIN 4 Science“ regt Kinder, aber auch Erwachsene spielerisch dazu an, sich mit dem Klimawandel auseinanderzusetzen. Konzipiert und…→Mit dem virtuellen Zug in eine nachhaltige Zukunft
-
Insights Transfer – Stories
 © HTW Berlin/Alexander Rentsch
Insights Transfer – StoriesAm Wirtschafts- und Wissenschaftsstandort Berlin Schöneweide trifft Tradition auf Ideen und Lösungen von morgen. Der wissenschaftliche Nucleus des…→
© HTW Berlin/Alexander Rentsch
Insights Transfer – StoriesAm Wirtschafts- und Wissenschaftsstandort Berlin Schöneweide trifft Tradition auf Ideen und Lösungen von morgen. Der wissenschaftliche Nucleus des…→Ort der Innovation und Transformation
-
Insights Transfer – Stories
 © vdo
Insights Transfer – StoriesProf. Dr. Claus Bull und Dipl.-Ing. Dirk Jäger untersuchen an der Berliner Hochschule für Technik, was Straßenbäume zum Überleben brauchen und wie sie…→
© vdo
Insights Transfer – StoriesProf. Dr. Claus Bull und Dipl.-Ing. Dirk Jäger untersuchen an der Berliner Hochschule für Technik, was Straßenbäume zum Überleben brauchen und wie sie…→„Wir muten den Bäumen in der Stadt ganz schön viel zu“
-
Insights Transfer – Stories
 © LAS Art Foundation/Juan Camilo Roan
Insights Transfer – Stories„Pollinator Pathmaker“ heißt das lebendige Kunstwerk der britischen Künstlerin Alexandra Daisy Ginsberg vor dem Museum für Naturkunde Berlin. Ihr…→
© LAS Art Foundation/Juan Camilo Roan
Insights Transfer – Stories„Pollinator Pathmaker“ heißt das lebendige Kunstwerk der britischen Künstlerin Alexandra Daisy Ginsberg vor dem Museum für Naturkunde Berlin. Ihr…→Garten-Kunst aus der Insektenperspektive
-
Insights Transfer – Stories
 © HTW Berlin/Alexander Rentsch
Insights Transfer – StoriesDas Projekt „Zukunft findet Stadt – Hochschulnetzwerk für ein resilientes Berlin“ ist für Berlin bisher einzigartig. Mehr erzählt Projektleiterin…→
© HTW Berlin/Alexander Rentsch
Insights Transfer – StoriesDas Projekt „Zukunft findet Stadt – Hochschulnetzwerk für ein resilientes Berlin“ ist für Berlin bisher einzigartig. Mehr erzählt Projektleiterin…→„Wir wollen, dass Innovationen, die in Berlin entstehen, hier auch umgesetzt werden“
-
Facts & Events Transfer – Stories
 © BHT/Zarko Martovic
Facts & Events Transfer – StoriesAm 17. Juni ist es wieder so weit: Mehr als 60 wissenschaftliche und wissenschaftsnahe Einrichtungen in der Brain City Berlin und Potsdam öffnen ihre…→
© BHT/Zarko Martovic
Facts & Events Transfer – StoriesAm 17. Juni ist es wieder so weit: Mehr als 60 wissenschaftliche und wissenschaftsnahe Einrichtungen in der Brain City Berlin und Potsdam öffnen ihre…→Lange Nacht der Wissenschaften 2023
-
Facts & Events Transfer – Stories
 © BSBI
Facts & Events Transfer – StoriesAm 24. Juni trifft sich die KI-Szene in Berlin-Neukölln. Auf der „1. Internationalen Konferenz für Künstliche Intelligenz“ an der BSBI geht es vor…→
© BSBI
Facts & Events Transfer – StoriesAm 24. Juni trifft sich die KI-Szene in Berlin-Neukölln. Auf der „1. Internationalen Konferenz für Künstliche Intelligenz“ an der BSBI geht es vor…→KI-Konferenz an der Berlin School of Business & Innovation
-
Startup Transfer – Stories
 © Quantistry
Startup Transfer – StoriesDas Berliner Start-up Quantistry ermöglicht chemische Experimente im digitalen Raum mithilfe Künstlicher Intelligenz und quantenchemischer…→
© Quantistry
Startup Transfer – StoriesDas Berliner Start-up Quantistry ermöglicht chemische Experimente im digitalen Raum mithilfe Künstlicher Intelligenz und quantenchemischer…→Das Chemielabor in der Wolke
-
Insights Transfer – Stories
 © Hallbauer & Fioretti
Insights Transfer – StoriesIm Brain City-Interview: Prof. Dr. Emmanuelle Charpentier, Nobelpreisträgerin und geschäftsführende Direktorin der Max-Planck-Forschungsstelle für die…→
© Hallbauer & Fioretti
Insights Transfer – StoriesIm Brain City-Interview: Prof. Dr. Emmanuelle Charpentier, Nobelpreisträgerin und geschäftsführende Direktorin der Max-Planck-Forschungsstelle für die…→„Grundlagenforschung ist die Basis für Innovationen“
-
Facts & Events Transfer – Stories
 © BVG/Andreas Süß
Facts & Events Transfer – StoriesWie klingt eigentlich ein E-Bus? Der UdK-Student Lukas Esser hat im Rahmen eines Wettbewerbs den neuen Sound für deutsche E-Busse entwickelt.→
© BVG/Andreas Süß
Facts & Events Transfer – StoriesWie klingt eigentlich ein E-Bus? Der UdK-Student Lukas Esser hat im Rahmen eines Wettbewerbs den neuen Sound für deutsche E-Busse entwickelt.→Elektro-Sound der Zukunft
-
Insights Transfer – Stories
 © ASH Berlin/Cristián Pérez
Insights Transfer – StoriesSAGE – das steht für Soziale Arbeit, Gesundheit, Erziehung und Bildung. Mehr über das Bündnis zwischen ASH Berlin, KHSB und EHB erzählt Prof. Dr.…→
© ASH Berlin/Cristián Pérez
Insights Transfer – StoriesSAGE – das steht für Soziale Arbeit, Gesundheit, Erziehung und Bildung. Mehr über das Bündnis zwischen ASH Berlin, KHSB und EHB erzählt Prof. Dr.…→SAGE – ein soziales Dreier-Bündnis
-
Facts & Events Transfer – Stories
 © Maschinenraum
Facts & Events Transfer – StoriesÜber die Zusammenarbeit mit dem bundesweiten Mittelstandsnetzwerk will die Hochschule für Technik und Wirtschaft weiteres Transferpotenzial…→
© Maschinenraum
Facts & Events Transfer – StoriesÜber die Zusammenarbeit mit dem bundesweiten Mittelstandsnetzwerk will die Hochschule für Technik und Wirtschaft weiteres Transferpotenzial…→HTW Berlin kooperiert mit Maschinenraum
-
Insights Transfer – Stories
 © QAH
Insights Transfer – StoriesDer Zukunftsort Technologie-Park Humboldthain in Wedding steht für Berliner Industriegeschichte – und für Synergien zwischen Wissenschaft und…→
© QAH
Insights Transfer – StoriesDer Zukunftsort Technologie-Park Humboldthain in Wedding steht für Berliner Industriegeschichte – und für Synergien zwischen Wissenschaft und…→Tradition meets Innovation
-
Insights Transfer – Stories
 © Stefan Schostok
Insights Transfer – StoriesEin Gastbeitrag von Brain City-Botschafterin Prof. Dr. Selin Arikoglu, Professorin für Kinder und Jugendhilfe an der Katholischen Hochschule für…→
© Stefan Schostok
Insights Transfer – StoriesEin Gastbeitrag von Brain City-Botschafterin Prof. Dr. Selin Arikoglu, Professorin für Kinder und Jugendhilfe an der Katholischen Hochschule für…→Angehörigen von Strafgefangenen eine wissenschaftliche Stimme verleihen
-
Facts & Events Transfer – Stories
 © Berlin Partner
Facts & Events Transfer – StoriesMit einem neuen Imagefilm startet Brain City Berlin ins Jahr 2023. Protagonistinnen und Protagonisten des Videos sind unsere Brain…→
© Berlin Partner
Facts & Events Transfer – StoriesMit einem neuen Imagefilm startet Brain City Berlin ins Jahr 2023. Protagonistinnen und Protagonisten des Videos sind unsere Brain…→„Wir sind Brain City Berlin“
-
Insights Transfer – Stories
 © HWR Berlin/Franziska Ihle
Insights Transfer – StoriesIm Projekt „KlinKe“ erforschen Prof. Dr. Silke Bustamante und Prof. Dr. Andrea Pelzeter an der HWR Berlin, welche Sekundärprozesse im Krankenhaus…→
© HWR Berlin/Franziska Ihle
Insights Transfer – StoriesIm Projekt „KlinKe“ erforschen Prof. Dr. Silke Bustamante und Prof. Dr. Andrea Pelzeter an der HWR Berlin, welche Sekundärprozesse im Krankenhaus…→Auf dem Weg zum klimaneutralen Krankenhaus
-
Facts & Events Transfer – Stories
 © Transfer Week
Facts & Events Transfer – StoriesVom 21. bis zum 25. November können Wissenschaftlerinnen und Wissenschaftler wieder zusammen mit Unternehmen aus Berlin und Brandenburg…→
© Transfer Week
Facts & Events Transfer – StoriesVom 21. bis zum 25. November können Wissenschaftlerinnen und Wissenschaftler wieder zusammen mit Unternehmen aus Berlin und Brandenburg…→Impulse setzen für Kooperationen: Transfer Week 2022
-
Facts & Events Transfer – Stories
 © Falling Walls Foundation
Facts & Events Transfer – StoriesVom 1. bis zum 10. November ist die Brain City Berlin wieder ein Hotspot der internationalen→
© Falling Walls Foundation
Facts & Events Transfer – StoriesVom 1. bis zum 10. November ist die Brain City Berlin wieder ein Hotspot der internationalen→
Science Community. Interview mit Festival-Leiterin…Wissenschaft für den Dialog mit der Gesellschaft öffnen
-
Insights Transfer – Stories
 Shutterstock © Monster Ztudio
Insights Transfer – StoriesMithilfe von Künstlicher Intelligenz will das in der Brain City Berlin verankerte, interdisziplinäre Forschungsprojekt manipulierte Medien-Inhalte…→
Shutterstock © Monster Ztudio
Insights Transfer – StoriesMithilfe von Künstlicher Intelligenz will das in der Brain City Berlin verankerte, interdisziplinäre Forschungsprojekt manipulierte Medien-Inhalte…→„news-polygraph“: Förderung durch BMBF
-
Insights Transfer – Stories
 © Felix Noak
Insights Transfer – StoriesIm Brain City-Interview: Dr. phil. Thorsten Philipp, Referent für Transdisziplinäre Lehre im Präsidium der Technischen Universität Berlin.→
© Felix Noak
Insights Transfer – StoriesIm Brain City-Interview: Dr. phil. Thorsten Philipp, Referent für Transdisziplinäre Lehre im Präsidium der Technischen Universität Berlin.→„Jeder weiß etwas“
-
Insights Transfer – Stories
 @ Ernestine von der Osten-Sacken
Insights Transfer – StoriesHören wie die Fledermaus: Auf "Sound Walk" mit Hannes Hoelzl, Klangkünstler und Dozent für Generative Arts/Computational Arts an der UdK Berlin.→
@ Ernestine von der Osten-Sacken
Insights Transfer – StoriesHören wie die Fledermaus: Auf "Sound Walk" mit Hannes Hoelzl, Klangkünstler und Dozent für Generative Arts/Computational Arts an der UdK Berlin.→Mit den Ohren sehen
-
Transfer – Stories
 Foto: Shutterstock © Yurchanka Siarhei
Transfer – Stories22 Millionen Euro wird das Berliner KI-Kompetenzzentrum BIFOLD künftig jährlich vom Bund und dem Land Berlin erhalten.→
Foto: Shutterstock © Yurchanka Siarhei
Transfer – Stories22 Millionen Euro wird das Berliner KI-Kompetenzzentrum BIFOLD künftig jährlich vom Bund und dem Land Berlin erhalten.→Millionenförderung für Berliner KI-Forschung
-
Transfer – Stories
 Falling Walls Foundation © Judith Schalansky
Transfer – StoriesVom 1. bis zum 10. November trifft sich die Welt der Wissenschaft wieder in der Brain City Berlin. Organisationen können sich noch bis zum 31. Juli…→
Falling Walls Foundation © Judith Schalansky
Transfer – StoriesVom 1. bis zum 10. November trifft sich die Welt der Wissenschaft wieder in der Brain City Berlin. Organisationen können sich noch bis zum 31. Juli…→„Trau dich, zu wissen“: Berlin Science Week 2022
-
Transfer – Stories
 EUREF AG©Gasometertour.de
Transfer – StoriesAuf dem EUREF-Campus in Berlin-Schöneberg arbeiten Wissenschaft und Wirtschaft an klimaneutralen, ressourcenschonenden und intelligenten Lösungen für…→
EUREF AG©Gasometertour.de
Transfer – StoriesAuf dem EUREF-Campus in Berlin-Schöneberg arbeiten Wissenschaft und Wirtschaft an klimaneutralen, ressourcenschonenden und intelligenten Lösungen für…→Energiewende zum Anfassen
-
Transfer – Stories
 © SCC Events/Norbert Wilhelmi
Transfer – StoriesInterview mit Brain City-Botschafterin Prof. Dr. Gabriele Mielke, Vizepräsidentin der VICTORIA | Internationale Hochschule und zugleich…→
© SCC Events/Norbert Wilhelmi
Transfer – StoriesInterview mit Brain City-Botschafterin Prof. Dr. Gabriele Mielke, Vizepräsidentin der VICTORIA | Internationale Hochschule und zugleich…→„Großveranstaltungen betreffen das Leben der Stadt auf unterschiedlichen Ebenen“
-
Transfer – Stories
") Foto: Ernestine von der Osten-Sacken (vdo)
Transfer – StoriesIm Charlottenburger Innovations-Centrum CHIC sitzen rund 50 Start-ups. Die Vernetzung am Standort ist ausgesprochen gut, denn das CHIC gehört zu einem…→
Foto: Ernestine von der Osten-Sacken (vdo)
Transfer – StoriesIm Charlottenburger Innovations-Centrum CHIC sitzen rund 50 Start-ups. Die Vernetzung am Standort ist ausgesprochen gut, denn das CHIC gehört zu einem…→CHIC – Gründungszentrum am Zukunftsort
-
Transfer – Stories
 Foto: Mall Anders/Matthew Crabbe
Transfer – Stories„Mall Anders“ heißt ein offenes Lernlabor, das FU Berlin, HU Berlin, TU Berlin und Charité – Universitätsmedizin gemeinsam in einer Shopping Mall…→
Foto: Mall Anders/Matthew Crabbe
Transfer – Stories„Mall Anders“ heißt ein offenes Lernlabor, das FU Berlin, HU Berlin, TU Berlin und Charité – Universitätsmedizin gemeinsam in einer Shopping Mall…→Wissenschaft in der Shopping Mall
-
Transfer – Stories
 Prof. Christian Matzdorf, Polizeikommissar Turgay Akkaya, Stefan Graf Finck von Finckenstein, Foto: HWR Berlin / Sylke Schumann") (V.li.n.re.) Prof. Christian Matzdorf, Polizeikommissar Turgay Akkaya, Stefan Graf Finck von Finckenstein, Foto: HWR Berlin / Sylke Schumann
Transfer – StoriesPolizeikommissar Turgay Akkaya hat im Rahmen seines Bachelor-Projekts an der HWR Berlin eine Anti-Stalking-App entwickelt. Für den hohen Praxisbezug…→
(V.li.n.re.) Prof. Christian Matzdorf, Polizeikommissar Turgay Akkaya, Stefan Graf Finck von Finckenstein, Foto: HWR Berlin / Sylke Schumann
Transfer – StoriesPolizeikommissar Turgay Akkaya hat im Rahmen seines Bachelor-Projekts an der HWR Berlin eine Anti-Stalking-App entwickelt. Für den hohen Praxisbezug…→Eine präventive App gegen Stalking
-
Transfer – Stories
 Steffen Terberl/FU Berlin; Prof. Dr. Hannes Rothe/ICN Business School, Foto: Ernestine von der Osten-Sacken") (V.li.n.re.) Steffen Terberl/FU Berlin; Prof. Dr. Hannes Rothe/ICN Business School, Foto: Ernestine von der Osten-Sacken
Transfer – StoriesIm Bereich BioTech verschenkt die Brain City Berlin Innovations-Potenzial. Zu diesem Schluss kommt der „Deep Tech Futures Report 2021: Bio- und…→
(V.li.n.re.) Steffen Terberl/FU Berlin; Prof. Dr. Hannes Rothe/ICN Business School, Foto: Ernestine von der Osten-Sacken
Transfer – StoriesIm Bereich BioTech verschenkt die Brain City Berlin Innovations-Potenzial. Zu diesem Schluss kommt der „Deep Tech Futures Report 2021: Bio- und…→„BioTech ist kein Selbstläufer“
-
Transfer – Stories
 Foto: Christina Lüdtke privat
Transfer – StoriesVier Universitäten, ein Verbund: Das Netzwerk „Science & Startups“ bündelt die Gründungs-Services der in der Berlin University Alliance vereinten…→
Foto: Christina Lüdtke privat
Transfer – StoriesVier Universitäten, ein Verbund: Das Netzwerk „Science & Startups“ bündelt die Gründungs-Services der in der Berlin University Alliance vereinten…→Breite Unterstützung für Hochschul-Start-ups
-
Transfer – Stories
 Transfer – StoriesVom 22. bis zum 26. November geht es auf der Transfer Week 2021 in digitalen Sessions darum, den Austausch zwischen Wissenschaft und Wirtschaft zu…→
Transfer – StoriesVom 22. bis zum 26. November geht es auf der Transfer Week 2021 in digitalen Sessions darum, den Austausch zwischen Wissenschaft und Wirtschaft zu…→Sensibilisierung für Wissens- und Technologietransfer: Transfer Week 2021
-
Transfer – Stories
 Foto: privat
Transfer – StoriesEin Gastbeitrag von Brain City-Botschafterin Dr. Anna Klippstein, Professorin für Finanzen, und Eliyahu Mätzschker, Student am Touro College Berlin.→
Foto: privat
Transfer – StoriesEin Gastbeitrag von Brain City-Botschafterin Dr. Anna Klippstein, Professorin für Finanzen, und Eliyahu Mätzschker, Student am Touro College Berlin.→Der Einfluss der Pandemie auf den Kapitalmarkt
-
Transfer – Stories
 Foto: André Bakker
Transfer – StoriesEin Gastbeitrag von Brain City-Botschafterin Prof. Dr. Anabel Ternès von Hattburg, Professorin für Internationale BWL an der SRH Berlin University of…→
Foto: André Bakker
Transfer – StoriesEin Gastbeitrag von Brain City-Botschafterin Prof. Dr. Anabel Ternès von Hattburg, Professorin für Internationale BWL an der SRH Berlin University of…→Zugang zur Digitalität finden
-
Transfer – Stories
, Gesine Höltmann (Foto: Martina Sander)") Swen Hutter (Foto: David Ausserhofer), Gesine Höltmann (Foto: Martina Sander)
Transfer – StoriesEin Gastbeitrag von Gesine Höltmann, wissenschaftliche Mitarbeiterin am Zentrum für Zivilgesellschaftsforschung und und Swen Hutter, stellvertretender…→
Swen Hutter (Foto: David Ausserhofer), Gesine Höltmann (Foto: Martina Sander)
Transfer – StoriesEin Gastbeitrag von Gesine Höltmann, wissenschaftliche Mitarbeiterin am Zentrum für Zivilgesellschaftsforschung und und Swen Hutter, stellvertretender…→Polarisierung und Zusammenhalt in der Corona-Krise
-
Transfer – Stories
 Foto: "Lucid Dream", Elena Kunau und Mariya Yordanova
Transfer – StoriesARTIFICIAL REALITY – VIRTUAL INTELLIGENCE heißt die Ausstellung, die vom 8. bis 12. September im Rahmen des Ars Electronica Garden Berlin zu sehen…→
Foto: "Lucid Dream", Elena Kunau und Mariya Yordanova
Transfer – StoriesARTIFICIAL REALITY – VIRTUAL INTELLIGENCE heißt die Ausstellung, die vom 8. bis 12. September im Rahmen des Ars Electronica Garden Berlin zu sehen…→Interaktion durch Emotion
-
Transfer – Stories
 Foto: Peter Himsel/Campus Berlin-Buch GmbH
Transfer – StoriesDer Campus Berlin-Buch im Norden der Brain City Berlin entwickelt sich zu einem der größten Wirtschafts- und Forschungsstandorte für Life Sciences in…→
Foto: Peter Himsel/Campus Berlin-Buch GmbH
Transfer – StoriesDer Campus Berlin-Buch im Norden der Brain City Berlin entwickelt sich zu einem der größten Wirtschafts- und Forschungsstandorte für Life Sciences in…→Lebendiges Gesundheitsnetzwerk
-
Transfer – Stories
 Credit: Markus Krutzik
Transfer – StoriesDr. Markus Krutzik, Leiter des Joint Lab Integrated Quantum Sensors (IQS), über die Veranstaltungsreihe „Wissenschaft trifft Wirtschaft“ von der…→
Credit: Markus Krutzik
Transfer – StoriesDr. Markus Krutzik, Leiter des Joint Lab Integrated Quantum Sensors (IQS), über die Veranstaltungsreihe „Wissenschaft trifft Wirtschaft“ von der…→„Ich bin fasziniert von den Möglichkeiten, die in der Quantensensorik schlummern“
-
Transfer – Stories
 Foto: ESCP Business School Berlin
Transfer – StoriesWas tun, wenn in der Lehre auf einmal Distanz verordnet ist? Ein Gastbeitrag von Dr. René Mauer, Professor für Entrepreneurship und Innovation an der…→
Foto: ESCP Business School Berlin
Transfer – StoriesWas tun, wenn in der Lehre auf einmal Distanz verordnet ist? Ein Gastbeitrag von Dr. René Mauer, Professor für Entrepreneurship und Innovation an der…→Mit Whiteboards gegen die digitale Müdigkeit
-
Transfer – Stories
 Credit: Alexander Rentsch/HTW Berlin
Transfer – StoriesProf. Dr. Florian Koch bringt als Experte für Stadtentwicklung und Smart Cities an der HTW Berlin in seiner Forschung Wissenschaft, Wirtschaft und…→
Credit: Alexander Rentsch/HTW Berlin
Transfer – StoriesProf. Dr. Florian Koch bringt als Experte für Stadtentwicklung und Smart Cities an der HTW Berlin in seiner Forschung Wissenschaft, Wirtschaft und…→„Die zunehmende Urbanisierung bietet auch Chancen“
-
Transfer – Stories
 Foto: Hannah Kerkhoff
Transfer – StoriesProf. Dr. Johannes Gräske, Leiter des Studiengangs Pflege an der ASH Berlin, im Brain City-Interview.→
Foto: Hannah Kerkhoff
Transfer – StoriesProf. Dr. Johannes Gräske, Leiter des Studiengangs Pflege an der ASH Berlin, im Brain City-Interview.→Mit Akademisierung dem Pflexit begegnen
-
Transfer – Stories
 Credit: Rudolf Grillborzer
Transfer – StoriesEin Gastbeitrag von Brain City-Botschafter Dr.-Ing. Onur Günlü, Nachwuchsgruppenleiter und Dozent am Lehrstuhl für Informationstheorie und deren…→
Credit: Rudolf Grillborzer
Transfer – StoriesEin Gastbeitrag von Brain City-Botschafter Dr.-Ing. Onur Günlü, Nachwuchsgruppenleiter und Dozent am Lehrstuhl für Informationstheorie und deren…→Ausloten der „ultimativen Grenze“
-
Transfer – Stories
 Credt: Startup Incubator Berlin
Transfer – StoriesDer Startup Incubator Berlin (SIB) der Hochschule für Wirtschaft und Recht Berlin bringt Gründer-Teams besonders erfolgreich an den Start – wie die…→
Credt: Startup Incubator Berlin
Transfer – StoriesDer Startup Incubator Berlin (SIB) der Hochschule für Wirtschaft und Recht Berlin bringt Gründer-Teams besonders erfolgreich an den Start – wie die…→„Wir bringen Ideen an den Markt“
-
Transfer – Stories
 Credit: Mimi Thian on Unsolash
Transfer – StoriesEin Gastbeitrag von Brain-City-Botschafter Dr. Petyo Budakov, University of Europe for Applied Sciences.→
Credit: Mimi Thian on Unsolash
Transfer – StoriesEin Gastbeitrag von Brain-City-Botschafter Dr. Petyo Budakov, University of Europe for Applied Sciences.→„Mit Stolz präsentiert: die Brain City Berlin 2020“
-
Transfer – Stories
") Susanne Plaumann (privat)
Transfer – StoriesEin Interview mit Brain City-Botschafterin Susanne Plaumann M.A., Zentrale Frauenbeauftragte an der Beuth Hochschule für Technik Berlin, anlässlich…→
Susanne Plaumann (privat)
Transfer – StoriesEin Interview mit Brain City-Botschafterin Susanne Plaumann M.A., Zentrale Frauenbeauftragte an der Beuth Hochschule für Technik Berlin, anlässlich…→„Karrieren sind für Wissenschaftlerinnen heute planbarer“
-
Transfer – Stories
 Adi Goldstein auf Unsplash
Transfer – StoriesDie StadtManufaktur Berlin vereint Forschungsprojekte der TU Berlin unter einem Dach. Langfristiges Ziel dieser „offenen Laborsituation“: die Brain…→
Adi Goldstein auf Unsplash
Transfer – StoriesDie StadtManufaktur Berlin vereint Forschungsprojekte der TU Berlin unter einem Dach. Langfristiges Ziel dieser „offenen Laborsituation“: die Brain…→Wissenschaft im Austausch mit der Stadt
-
Transfer – Stories
 Falk Weiß
Transfer – StoriesDas Wissensportal „humboldts17“ stellt aktuelle Forschung rund um das Thema Nachhaltigkeit vor und lädt zu einem Austausch mit der breiten…→
Falk Weiß
Transfer – StoriesDas Wissensportal „humboldts17“ stellt aktuelle Forschung rund um das Thema Nachhaltigkeit vor und lädt zu einem Austausch mit der breiten…→17 Ziele für die Zukunft
-
Transfer – Stories
 Foto: Olga Makarova privat
Transfer – StoriesBrain City-Botschafterin Dr. Olga Makarova über ihre Forschung während der Pandemie – und den Bedarf der Gesellschaft an mikrobiologischem Wissen.→
Foto: Olga Makarova privat
Transfer – StoriesBrain City-Botschafterin Dr. Olga Makarova über ihre Forschung während der Pandemie – und den Bedarf der Gesellschaft an mikrobiologischem Wissen.→Gastbeitrag: COVID-19 und mikrobiologisches Wissen
-
Transfer – Stories
 HIIG
Transfer – StoriesIm Brain City-Interview: Prof. Dr. Wolfgang Schulz, Forschungsdirektor im Bereich „Internet und Medienregulierung“ am Alexander von Humboldt Institut…→
HIIG
Transfer – StoriesIm Brain City-Interview: Prof. Dr. Wolfgang Schulz, Forschungsdirektor im Bereich „Internet und Medienregulierung“ am Alexander von Humboldt Institut…→„Ein nachhaltiges Ziel unserer Arbeit ist es, zu verdeutlichen, was die Technik eigentlich kann“
-
Transfer – Stories
 HTW Berlin
Transfer – StoriesInterview mit Brain City-Botschafter Prof. Dr. Kai Reinhardt. Der Wirtschaftswissenschaftler ist Gast beim 2. SpreeTalk der HTW Berlin am 29. 10.…→
HTW Berlin
Transfer – StoriesInterview mit Brain City-Botschafter Prof. Dr. Kai Reinhardt. Der Wirtschaftswissenschaftler ist Gast beim 2. SpreeTalk der HTW Berlin am 29. 10.…→„Die Corona-Krise wirkt als Katalysator der Digitalisierung“
-
Transfer – Stories
 dentalXr.ai
Transfer – StoriesdentalXrai ist das erste zahnmedizinische Start-up, das sich aus der Charité heraus gegründet hat. Auf den Weg gebracht wurde es über den Accelerator…→
dentalXr.ai
Transfer – StoriesdentalXrai ist das erste zahnmedizinische Start-up, das sich aus der Charité heraus gegründet hat. Auf den Weg gebracht wurde es über den Accelerator…→Mit künstlicher Intelligenz gegen Karies & Co.
-
Transfer – Stories
 Anna Raysyan privat
Transfer – StoriesBrain City-Botschafterin Anna Raysyan lebt seit 3,5 Jahren in Berlin. Sie ist Doktorandin an der Bundesanstalt für Materialforschung und -prüfung…→
Anna Raysyan privat
Transfer – StoriesBrain City-Botschafterin Anna Raysyan lebt seit 3,5 Jahren in Berlin. Sie ist Doktorandin an der Bundesanstalt für Materialforschung und -prüfung…→Gastbeitrag: „Berlin mag die Mutigen!"
-
Transfer – Stories
 ©Berlin Partner für Wirtschaft und Technologie
Transfer – StoriesViele hochkarätige Wissenschaftler*innen zieht es jährlich in die Brain City Berlin. Das Dual Career Network Berlin unterstützt Partner*innen von…→
©Berlin Partner für Wirtschaft und Technologie
Transfer – StoriesViele hochkarätige Wissenschaftler*innen zieht es jährlich in die Brain City Berlin. Das Dual Career Network Berlin unterstützt Partner*innen von…→Dual Career Network Berlin – Fuß fassen in Berlin
-
Transfer – Stories
 ©Matthias Picket
Transfer – StoriesDr. Anne Schreiter, Geschäftsführerin der German Scholars Organization (GSO), verrät im Brain City-Interview, welche alternativen…→
©Matthias Picket
Transfer – StoriesDr. Anne Schreiter, Geschäftsführerin der German Scholars Organization (GSO), verrät im Brain City-Interview, welche alternativen…→„Wissenschaft bedeutet nicht nur Forschung“
-
Transfer – Stories
 © Pocky Lee on Unsplash
Transfer – StoriesGeisterspiele vor leeren Rängen, virtuelle Marathons und Eventverschiebungen. Die Auswirkungen der Corona-Krise auf den Spitzen- und Breitensport…→
© Pocky Lee on Unsplash
Transfer – StoriesGeisterspiele vor leeren Rängen, virtuelle Marathons und Eventverschiebungen. Die Auswirkungen der Corona-Krise auf den Spitzen- und Breitensport…→„Jetzt schlägt die Stunde der Innovator*innen“
-
Transfer – Stories
 © AW Creative on Unsplash
Transfer – StoriesDas Studium oder eine Lehr- bzw. Forschungstätigkeit mit der Betreuung von Kindern oder der Pflege von Angehörigen zu vereinbaren, ist keine leichte…→
© AW Creative on Unsplash
Transfer – StoriesDas Studium oder eine Lehr- bzw. Forschungstätigkeit mit der Betreuung von Kindern oder der Pflege von Angehörigen zu vereinbaren, ist keine leichte…→Von der Tierparkschule bis zum Mutterschutz – familienfreundliche Hochschulen
-
Transfer – Stories
 © HTW Berlin / Nikolas Fahlbusch
Transfer – StoriesLehre findet momentan ausschließlich online statt. Gastautorin Dr. Dorothee Haffner, Professorin im Studiengang Museumskunde der Hochschule für…→
© HTW Berlin / Nikolas Fahlbusch
Transfer – StoriesLehre findet momentan ausschließlich online statt. Gastautorin Dr. Dorothee Haffner, Professorin im Studiengang Museumskunde der Hochschule für…→Gastbeitrag: „Online-Lehre ist lebhafter, als ich gedacht habe“
-
Transfer – Stories
 Franziska Sattler
Transfer – StoriesIm Interview: Brain City-Botschafterin Franziska Sattler über ihre Veranstaltungsreihe „Kaffeeklatsch mit Wissenschaft“ im Museum für Naturkunde…→
Franziska Sattler
Transfer – StoriesIm Interview: Brain City-Botschafterin Franziska Sattler über ihre Veranstaltungsreihe „Kaffeeklatsch mit Wissenschaft“ im Museum für Naturkunde…→„Die Wissenschaft braucht das Vertrauen der Gesellschaft“
-
Transfer – Stories
 Fotocredit: Ortner & Ortner / Siemens
Transfer – StoriesSiemensstadt 2.0 ist ein Ort der Zukunft. Bis 2030 soll auf dem historischen Firmengelände im Nordwesten der Brain City ein moderner, weltoffener…→
Fotocredit: Ortner & Ortner / Siemens
Transfer – StoriesSiemensstadt 2.0 ist ein Ort der Zukunft. Bis 2030 soll auf dem historischen Firmengelände im Nordwesten der Brain City ein moderner, weltoffener…→Siemensstadt 2.0: Forschung und Industrie eng verknüpft
-
Transfer – Stories
 ©Credit Silke Oßwald/FMP
Transfer – StoriesProfessor Dr. Volker Haucke, Direktor am Leibniz-Forschungsinstitut für Molekulare Pharmakologie (FMP) und Professor für Molekulare Pharmakologie an…→
©Credit Silke Oßwald/FMP
Transfer – StoriesProfessor Dr. Volker Haucke, Direktor am Leibniz-Forschungsinstitut für Molekulare Pharmakologie (FMP) und Professor für Molekulare Pharmakologie an…→Im Spagat zwischen Detail und Gesamtkonzept
-
Transfer – Stories
 © hj barraza/Unsplash
Transfer – StoriesUnsere Gastautorin Dr. Barbara Schäuble, Professorin für„Diversitätsbewusste Ansätze in Theorie und Praxis Sozialer Arbeit“ an der Alice Salomon…→
© hj barraza/Unsplash
Transfer – StoriesUnsere Gastautorin Dr. Barbara Schäuble, Professorin für„Diversitätsbewusste Ansätze in Theorie und Praxis Sozialer Arbeit“ an der Alice Salomon…→Gastbeitrag: Ein plötzlicher Kurswechsel – Präsenzblöcke ins Netz verlegen
-
Transfer – Stories
 ©DexLeChem
Transfer – StoriesAus der Hochschule heraus ein Start-up gründen? Sonja Jost machte es erfolgreich vor. Gemeinsam mit drei Kommiliton*innen gründete sie nach dem…→
©DexLeChem
Transfer – StoriesAus der Hochschule heraus ein Start-up gründen? Sonja Jost machte es erfolgreich vor. Gemeinsam mit drei Kommiliton*innen gründete sie nach dem…→„Neue Erkenntnisse in den Markt zu bringen, ist uns sehr wichtig“
-
Transfer – Stories
 ©Ivar Veermäe / Centre for Entrepreneurship
Transfer – StoriesUm herauszufinden, welche wirtschaftliche Bedeutung wissenschaftsbasierte Ausgründungen für Berlin und Brandenburg haben, führen insgesamt zehn…→
©Ivar Veermäe / Centre for Entrepreneurship
Transfer – StoriesUm herauszufinden, welche wirtschaftliche Bedeutung wissenschaftsbasierte Ausgründungen für Berlin und Brandenburg haben, führen insgesamt zehn…→„Vor allem die Gesellschaft profitiert von Hightech-Start-ups“– Gründungsumfrage der Hochschulen geht in die dritte Runde
-
Transfer – Stories
 ©BIH|Thomas Rafalzyk
Transfer – StoriesAm Berliner Institut für Gesundheitsforschung (BIH) geht es vor allem um „Translation“: die Übertragung von Erkenntnissen aus dem Forschungslabor in…→
©BIH|Thomas Rafalzyk
Transfer – StoriesAm Berliner Institut für Gesundheitsforschung (BIH) geht es vor allem um „Translation“: die Übertragung von Erkenntnissen aus dem Forschungslabor in…→„Es gibt es inzwischen viele tolle Wissenschaftlerinnen, die Großartiges leisten“
-
Transfer – Stories
 ©fotografixx-istockphoto.com
Transfer – StoriesDas Lernverhalten im digitalen Zeitalter ändert sich grundlegend. Es stellt die Studierenden in den Mittelpunkt und ist technologieorientiert.→
©fotografixx-istockphoto.com
Transfer – StoriesDas Lernverhalten im digitalen Zeitalter ändert sich grundlegend. Es stellt die Studierenden in den Mittelpunkt und ist technologieorientiert.→Die Zukunft des Lernens erforschen
-
Transfer – Stories
 © Brain City Berlin
Transfer – StoriesForschungsergebnisse schnell und einfach zugänglich im Netz: Die Open-Access-Bewegung wirbt für einen Paradigmenwechsel im Publikationswesen und…→
© Brain City Berlin
Transfer – StoriesForschungsergebnisse schnell und einfach zugänglich im Netz: Die Open-Access-Bewegung wirbt für einen Paradigmenwechsel im Publikationswesen und…→Open Access: freies Wissen für alle
-
Transfer – Stories
 ©ESCP EUROPE
Transfer – Stories29.10.2019 | Prof. Dr. Andreas Kaplan ist Brain City Berlin-Botschafter und Rektor der ESCP Europe Business School Berlin. In seiner Forschung…→
©ESCP EUROPE
Transfer – Stories29.10.2019 | Prof. Dr. Andreas Kaplan ist Brain City Berlin-Botschafter und Rektor der ESCP Europe Business School Berlin. In seiner Forschung…→„Wir müssen es schaffen, jeden auf die Reise mitzunehmen“
-
Transfer – Stories
 Gudrun Piechotta-Henze
Transfer – StoriesZum Wintersemester 2020/21 führt die Alice Salomon Hochschule (ASH) Berlin den ersten primärqualifizierenden Bachelorstudiengang Pflege in der Brain…→
Gudrun Piechotta-Henze
Transfer – StoriesZum Wintersemester 2020/21 führt die Alice Salomon Hochschule (ASH) Berlin den ersten primärqualifizierenden Bachelorstudiengang Pflege in der Brain…→„Wir müssen Pflege völlig neu denken!“ | 27.09.2019
-
Transfer – Stories
 ©Humboldt-Universität zu Berlin/Matthias Heyde
Transfer – StoriesDas Kursangebot der HUWISU Summer University ist vielfältig und spannend, die Zielgruppe international: Studierende aus dem Ausland, die für einige…→
©Humboldt-Universität zu Berlin/Matthias Heyde
Transfer – StoriesDas Kursangebot der HUWISU Summer University ist vielfältig und spannend, die Zielgruppe international: Studierende aus dem Ausland, die für einige…→Wenn Berlin zum Seminarraum wird ... | 15.08.2019
-
Transfer – Stories
 Transfer – StoriesDie Literaturwissenschaftlerin Dr. Betiel Wasihun war wissenschaftlich international unterwegs. Nach Stationen in Heidelberg, Yale und Oxford zog es…→
Transfer – StoriesDie Literaturwissenschaftlerin Dr. Betiel Wasihun war wissenschaftlich international unterwegs. Nach Stationen in Heidelberg, Yale und Oxford zog es…→„Berlin ist ein perfekter Standort. Vor allem, wenn man wissenschaftlich nicht eingleisig fahren möchte“ | 12.08.2019
-
Transfer – Stories
 Berlin University Alliance/Matthias Heyde
Transfer – StoriesGemeinsam ist man stärker. Und auch erfolgreicher. Als „Berlin University Alliance“ bewarben sich die Technische Universität Berlin, die Freie…→
Berlin University Alliance/Matthias Heyde
Transfer – StoriesGemeinsam ist man stärker. Und auch erfolgreicher. Als „Berlin University Alliance“ bewarben sich die Technische Universität Berlin, die Freie…→Herzlichen Glückwunsch: „Berlin University Alliance“ erhält Exzellenzförderung |19.07.2019
-
Transfer – Stories
 David Ausserhofer/IGB
Transfer – StoriesBerlin ist eine der wasserreichsten Städte Deutschlands. Doch auch vor Havel, Spree und Wannsee macht der Klimawandel nicht halt. Am Leibniz-Institut…→
David Ausserhofer/IGB
Transfer – StoriesBerlin ist eine der wasserreichsten Städte Deutschlands. Doch auch vor Havel, Spree und Wannsee macht der Klimawandel nicht halt. Am Leibniz-Institut…→„Wir versuchen, einen Blick in die Zukunft zu werfen“ | 04.07.2019
-
Transfer – Stories
 Helena Lopes / Unsplash
Transfer – StoriesEin digitaler Lutscher, zarte Duftnoten per Mail verschicken oder sich den Wind virtuell um die Nase wehen lassen – die Forschung macht’s möglich. Ein…→
Helena Lopes / Unsplash
Transfer – StoriesEin digitaler Lutscher, zarte Duftnoten per Mail verschicken oder sich den Wind virtuell um die Nase wehen lassen – die Forschung macht’s möglich. Ein…→Die Welt mit allen Sinnen digital erleben | 18.06.2019
-
Transfer – Stories
 HZB/M. Setzpfandt
Transfer – StoriesIn Zeiten von Fake News und pseudowissenschaftlichen Veröffentlichungen fällt es vielen Menschen schwer, seriöse von unseriösen Inhalten zu…→
HZB/M. Setzpfandt
Transfer – StoriesIn Zeiten von Fake News und pseudowissenschaftlichen Veröffentlichungen fällt es vielen Menschen schwer, seriöse von unseriösen Inhalten zu…→„Wissenschaft muss neugierig machen“ | 11.06.2019
-
Transfer – Stories
 Tim Landgraf
Transfer – StoriesDie Brain City Berlin gilt als einer der führenden Standorte für Künstliche Intelligenz in Deutschland. An zahlreichen Instituten, Universitäten und…→
Tim Landgraf
Transfer – StoriesDie Brain City Berlin gilt als einer der führenden Standorte für Künstliche Intelligenz in Deutschland. An zahlreichen Instituten, Universitäten und…→Von Fischen, Bienen und selbstfahrenden Autos | 07.06.2019
-
Transfer – Stories
 Berlin Partner / Wüstenhagen
Transfer – StoriesWissenschaft und Kulturerbe, jederzeit für jedermann frei zugänglich im Netz: Die Open Access Bewegung wirbt für einen Paradigmenwechsel im…→
Berlin Partner / Wüstenhagen
Transfer – StoriesWissenschaft und Kulturerbe, jederzeit für jedermann frei zugänglich im Netz: Die Open Access Bewegung wirbt für einen Paradigmenwechsel im…→Wissen für Alle - Open Access in Berlin | 28.03.2019
-
Transfer – Stories
 Thomas Rosenthal - Museum für Naturkunde Berlin
Transfer – Stories660 Millionen Euro in 10 Jahren: Das Museum für Naturkunde Berlin erhält finanzielle Unterstützung für die Weiterentwicklung der Erforschung der…→
Thomas Rosenthal - Museum für Naturkunde Berlin
Transfer – Stories660 Millionen Euro in 10 Jahren: Das Museum für Naturkunde Berlin erhält finanzielle Unterstützung für die Weiterentwicklung der Erforschung der…→Zukunft des Museums für Naturkunde Berlin | 14.01.2019
-
Transfer – Stories
 Transfer – StoriesDass die Raumfahrt eine Revolution in der Kommerzialisierung erfährt, dürfte dank Firmen wie Elon Musks SpaceX bekannt sein. Doch ist auch bekannt,…→
Transfer – StoriesDass die Raumfahrt eine Revolution in der Kommerzialisierung erfährt, dürfte dank Firmen wie Elon Musks SpaceX bekannt sein. Doch ist auch bekannt,…→Von Berlin zum Mond: Die Berliner Raumfahrt-Szene boomt | 03.09.2018