-

BHT/Martin Gasch
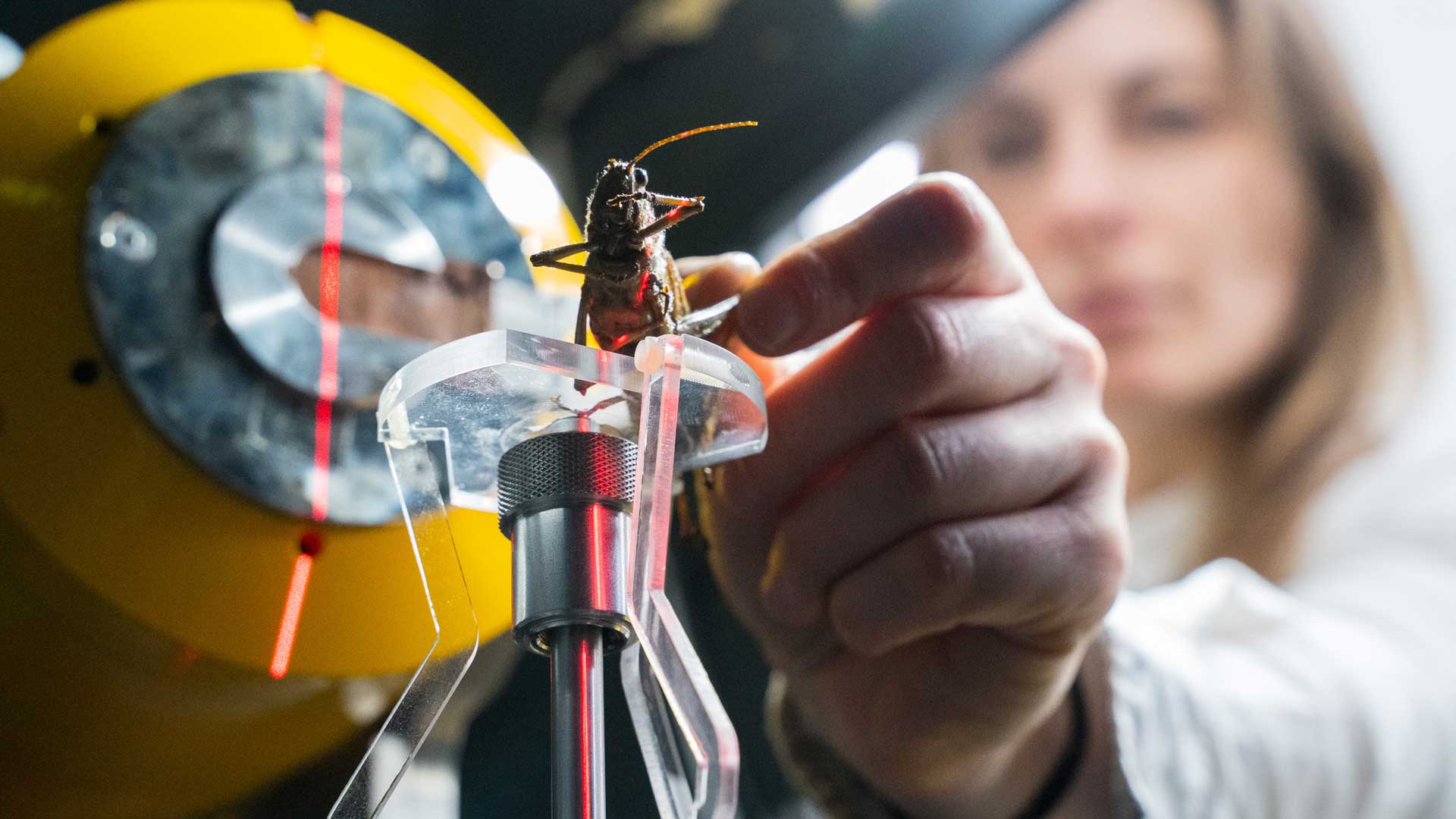
01.02.2022“Robots Can Save us a Great Deal of Work”

Whether it’s cleaning, manufacturing, service or care facilities – robots are becoming part of our daily lives. Together with his team at the Human.VR.Lab, Dr-Ing. Ivo Boblan, Professor of the Humanoid Robotics Study Programme at the Berliner Hochschule für Technik (BHT), is researching how humans and technology can interact more effectively in future. One focus of his work: Human acceptance of robots. What are the requirements for us to be able to communicate with robots? And where does our acceptance of them waiver? The Brain City Ambassador and speaker for the research group Humanoid Robotics and Human-Technology Interaction (HARMONIK) tells us more in this Brain City interview.
Prof. Dr Ing. Boblan. You are one of the most renowned robot researchers in Germany. What fascinates you about this topic?
I grew up with automation, with technology that moves. Even during my school years, I’d be soldering and assembling mechanical things. I was determined to study robotics. Back then, it was called automation technology. The robots I dealt with during my degree at the TU Dresden, and later at the TU Berlin, were still very rudimentary in terms of their functions and were very awkward to program. But even back then, in the early 1990s, I knew that this was the future.”
What makes robots so exciting as a research area?
Robots can save us a great deal of work. They can work for us non-stop. And they work far more accurately than we do. Today’s technology is naturally far more advanced than it was back in the 1990s. We’re no longer simply dealing with articulated or SCARA robots, which are the typical robots used in industry. Research is now headed towards humanoid robots. They have elbows, shoulders, knees and other limbs, with greater freedom of movement as a result. The exciting thing about them is that they can be programmed using freely available (open-source) software such as ‘GitHub’ and high-level language such as ‘Python’ to control and move them as needed. This is also easy and quick for students to learn. From as early as their second semester of our Humanoid Robotics course, students collaborate with PhD students on a robotic topic.
Robots are becoming more involved our daily lives: What are the developmental challenges you face here?
It’s neither enjoyable nor healthy for humans to perform monotonous tasks for hours on end. Robots, on the other hand, are great at this. For example, industrial robots in the automobile industry have been reliably and precisely welding and painting for years. The challenge now lies in developing robotic systems that can ease the everyday burden on humans, whether at home or in care facilities. They should be able to support physiotherapists by lifting and carrying patients. Or perhaps by helping older people with objects that are difficult to reach, such as taking cups off a shelf. These involve physically demanding routine activities. What's important is that talking, listening and other social interactions should still be undertaken by humans. However, the basic question is what do humans still want to do in future and which tasks would be better performed by robots?
Your research also focusses on the topic of soft robotics: to what extent should robots adapt their behaviour towards humans?
In order for robots to become involved in our daily lives in future, they’ll need to be soft and flexible in their movements. They must adapt to our characteristics. This is the only way we’ll accept them and feel comfortable around them. Modern industrial robots still move in a very stiff fashion. This is strange to us humans as we naturally have flexible movements. In concrete terms, this means that we need to make the motors and limbs softer in robots of the future. Flexible pneumatic actuators such as fluid muscles have been around on the market for a while now. They are inherently flexible and, when paired together, can generate soft movements that resemble human limbs in robotic systems. In the near future, robots will be so cheap that almost everyone will be able to afford one. The question is will we accept them? This will only happen if they are as human-like as possible. And by this I don’t mean that they look humanoid – with skin, hair and a face – but rather that they act humanoid.


Prof. Dr.-Ing. Ivo Boblan with his team and robot "Digit".
What should the robots look like then? In Berlin, the popular “Myon” robot developed by the Neurorobotics Research Laboratory of your colleague Prof. Dr Manfred Hild has a humanoid appearance. Doesn’t that contradict what you just said?
No, not at all. Myon has two arms, two legs and something that resembles a head. But he is small, can’t carry much, has electric motors in his joints and his fingers don’t move. He also doesn’t have skin, hair or a human face. He can be identified as a work of technology right away. When I talk about humanoid robots, I mean those which could be mistaken for humans from a distance. Such as the AMECA AI ROBOT recently presented at CES 2022 in Las Vegas or ‘Geminoid HI-1’, Hiroshi Ishiguro’s robot twin. If robots are too similar to us, we find them creepy. Using the uncanny valley hypothesis developed by Japanese roboticist Masahiro Mori back in 1970, our acceptance of robots that appear almost human drastically sinks, eliciting eerie feelings. In order for a robot to be accepted, it shouldn’t have a head. A speech display could suffice. However, all of these questions remain pretty much unanswered. They can, or even must, be answered by the very people who want to interact with them.
In the BHT’s HUMAN.VR.LAB, you’re testing robots using VR/AR and AI in various application areas. Can you tell us what they are?
Our Human.VR.Lab is a well-equipped laboratory where we carry out movement analyses, for example. Here, we attach markers to human joints to track their movements. We then transfer these movement patterns to the robots. In doing so, we’re trying to make our robot digit move in a more human-like way. We can also integrate other human characteristics by using virtual and augmented reality (VR/AR). This allows us to test the degree of acceptance without actually having to build the entire robot. This is far quicker and cheaper. We’ll also be working with technology sociologists at the Human VR Lab to better understand how we can increase our enjoyment of interacting with robots.
Can you give an example?
If a robot holds out its hand at an angle of 30 degrees, people spontaneously decide whether to “repair” this action or not. We then either take the hand and accept this deviation in movement - or not. The question here is at what position or to which degree of deviation from expectations do people still feel addressed and at what point do they ignore the extended robot hand? What do we need to change in the technology so that people forgive as many errors of the “unsatisfactory” robot as possible and repair the interaction? We’re focussing on this topic as part of my MIT-engAge young research group at the TU Berlin, which is sponsored by the BMBF.
In contrast, the ‘EPI’ project deals with exoskeletons - so with human support structures, right?
Yes, exactly. Together with the HTW University of Applied Sciences (HTW Berlin) and multiple industrial partners, we’ve developed two passive exoskeletons based on a grasshopper leap as part of a project sponsored by the IFAF Berlin, which is currently in its extension phase. It is designed to mechanically help humans lift and transport heavy objects. It’s not about giving us superhuman abilities: it’s more about reducing back pain, slipped discs, knee problems and symptoms of fatigue when working under high physical strain, or mechanically supporting people with a limited range of motion. The exoskeletons developed as part of the project are currently being tested by our project partners in real-life workplaces.
What is the objective of the BHT’s research group ‘Humanoid Robotics and Human-Technology Interaction (HARMONIK)’, for which you are now a speaker?
At the end of 2020 we brought two research groups to life at the BHT: ‘Data Science +X’ deals with learning behaviour, data mining and data quality, among other things. With HARMONIK, we want to optimise interactions between humans and robots using existing robot systems. This happens on different levels. On the one hand, we’re currently undertaking bachelor work that is researching how to intuitively communicate with a robot, such as asking it to lift a box: Do you talk to it, control it with a joystick or look at it while pointing towards the box? On the other hand, we want to improve the interactive experience and change robot systems without expensive and time-consuming processes. We achieve this using VR/AR - as previously mentioned - by compensating for the robot’s shortcomings such as a head or delicate hands using virtual augmentation and testing this combined real life and virtual world in interactions between humans and robots. Of course, I can’t do all this alone and work in close cooperation with my colleagues, Prof. Dr Kristian Hildebrand, Prof. Dr-Ing. Joachim Villwock and Prof. Dr-Ing. Hannes Höppner. 15 professors from the fields of social sciences, life sciences, IT, robotics and engineering work together as part of the group. Data Science +X and HARMONIK work in close partnership to research and teach at the Human VR Lab to bring technology closer to people. Another goal of HARMONIK is to consolidate the Human VR Lab. To create a place where all players work together on an inter-university basis to research and teach about human-centred technology. A major advantage of Berlin is that things can be quickly implemented here since we’re not following old methods. Also, because there are lots of people here who want to explore and develop new ideas and tools.
The title of Lunchtalk #08 by the BHT is called “How will humans and robots communicate in future?” Do you have an answer to this?
There will always be a difference between the sensors in technology and humans. We’ve got our five traditional senses; technology has a camera, speaker and microphone. Ideally, we’ll talk to the technology because it’s the easiest. But we’re primarily emotionally characterised by our sense of touch and feel. In the near future, there will be tools that allow us to feel and create a feeling of proximity despite distance, such as in video calls. We’ll presumably also be able to smell from a distance. These are emotional connections that we humans need. Us researchers are working on creating robots that communicate using all of the human senses. (vdo)
More Stories
-
Transfer – Stories Innovations
 Transfer – Stories InnovationsBerlin gives deep tech a strategy: The Deep Tech Berlin Agenda has been adopted.→
Transfer – Stories InnovationsBerlin gives deep tech a strategy: The Deep Tech Berlin Agenda has been adopted.→Berlin gives deep tech a strategy: The Deep Tech Berlin Agenda has been adopted
-
Transfer – Stories Innovations
 © PTB | Stephanie Rubrecht
Transfer – Stories InnovationsEarlier detection of mental illness: the Einstein Center for Youth Mental Health gets under way.→
© PTB | Stephanie Rubrecht
Transfer – Stories InnovationsEarlier detection of mental illness: the Einstein Center for Youth Mental Health gets under way.→Earlier detection of mental illness: the Einstein Center for Youth Mental Health gets under way
-
Facts & Events Transfer – Stories
 © Retusche: Gabriel_Kienast / Wissenschaft im Dialog, CC BY-SA 4.0
Facts & Events Transfer – StoriesThe MS Wissenschaft sets sail: Discover the medicine of the future on board.→
© Retusche: Gabriel_Kienast / Wissenschaft im Dialog, CC BY-SA 4.0
Facts & Events Transfer – StoriesThe MS Wissenschaft sets sail: Discover the medicine of the future on board.→The MS Wissenschaft sets sail: Discover the medicine of the future on board
-
Talent Facts & Events Transfer – Stories
 © Ilona Buchem
Talent Facts & Events Transfer – StoriesA social robot to help reduce stress: NEFFY 2.0 from Brain City Berlin→
© Ilona Buchem
Talent Facts & Events Transfer – StoriesA social robot to help reduce stress: NEFFY 2.0 from Brain City Berlin→A social robot to help reduce stress: NEFFY 2.0 from Brain City Berlin
-
Transfer – Stories
 © Christian Kielmann
Transfer – StoriesThe Einstein Center Digital Future: Shaping and reflecting on digital transformation.→
© Christian Kielmann
Transfer – StoriesThe Einstein Center Digital Future: Shaping and reflecting on digital transformation.→The Einstein Center Digital Future: Shaping and reflecting on digital transformation
-
Facts & Events Transfer – Stories
 © Bayer AG
Facts & Events Transfer – StoriesA new Future Site for Berlin: The Health Innovation Quarter in Mitte.→
© Bayer AG
Facts & Events Transfer – StoriesA new Future Site for Berlin: The Health Innovation Quarter in Mitte.→A new Future Site for Berlin: The Health Innovation Quarter in Mitte
-
Facts & Events Transfer – Stories
 v.l.n.r.: © GSCN / Arne Sattler © Jenny Evers © GABO © Linda Böse © Charlot van Heeswijk © LakoF Geschäftsstelle © KHSB © Anne Barth ©SPB_Pedro Bacerra
Facts & Events Transfer – StoriesWomen shaping science: Perspectives from Berlin's research landscape on International Women's Day.→
v.l.n.r.: © GSCN / Arne Sattler © Jenny Evers © GABO © Linda Böse © Charlot van Heeswijk © LakoF Geschäftsstelle © KHSB © Anne Barth ©SPB_Pedro Bacerra
Facts & Events Transfer – StoriesWomen shaping science: Perspectives from Berlin's research landscape on International Women's Day.→Women shaping science: Perspectives from Berlin's research landscape on International Women's Day
-
Insights Transfer – Stories
 © Nikolaus Brade
Insights Transfer – StoriesWith the project “Multisensory in Dialogue and Artistic Practice”, UdK Berlin and Folkwang are sending a strong signal for the future of artistic…→
© Nikolaus Brade
Insights Transfer – StoriesWith the project “Multisensory in Dialogue and Artistic Practice”, UdK Berlin and Folkwang are sending a strong signal for the future of artistic…→Unlocking Joint Potential
-
Transfer – Stories
 © Shutterstock / Studio Romantic
Transfer – StoriesCan elderly people regain independence through targeted exercise? Brain City Ambassador Prof. Dr. Uwe Bettig of ASH Berlin examined this question in…→
© Shutterstock / Studio Romantic
Transfer – StoriesCan elderly people regain independence through targeted exercise? Brain City Ambassador Prof. Dr. Uwe Bettig of ASH Berlin examined this question in…→Fit for home again
-
Facts & Events Transfer – Stories
 © Agentur Medienlabor / Stefan Schubert
Facts & Events Transfer – StoriesFive companies from the capital region were honoured for their visionary ideas and products, and another received a special award.→
© Agentur Medienlabor / Stefan Schubert
Facts & Events Transfer – StoriesFive companies from the capital region were honoured for their visionary ideas and products, and another received a special award.→Berlin Brandenburg Innovation Award 2025 – The Winners
-
Insights Transfer – Stories
 © TU Berlin/Felix Noak
Insights Transfer – StoriesProf. Dr. Giuseppe Caire, at TU Berlin, is working on a new transmission method that could revolutionize wireless communication completely.→
© TU Berlin/Felix Noak
Insights Transfer – StoriesProf. Dr. Giuseppe Caire, at TU Berlin, is working on a new transmission method that could revolutionize wireless communication completely.→Rethinking Wireless Communication
-
Insights Transfer – Stories
 © HTW Berlin/Alexander Rentsch
Insights Transfer – StoriesIn January 2025, the European University Alliance EUonAIR was launched. More about this unique alliance tells us Brain City Ambassador Prof. Dr.…→
© HTW Berlin/Alexander Rentsch
Insights Transfer – StoriesIn January 2025, the European University Alliance EUonAIR was launched. More about this unique alliance tells us Brain City Ambassador Prof. Dr.…→"We don't want to reinvent the wheel”
-
Facts & Events Transfer – Stories
 © Christian Kielmann
Facts & Events Transfer – StoriesEurope’s largest laboratory infrastructure for transfer teams in the field of Green Chemistry is being built on the campus of TU Berlin. The “Chemical…→
© Christian Kielmann
Facts & Events Transfer – StoriesEurope’s largest laboratory infrastructure for transfer teams in the field of Green Chemistry is being built on the campus of TU Berlin. The “Chemical…→Construction Kick-off: „Chemical Invention Factory“
-
Facts & Events Transfer – Stories
 © TU Berlin / allefarben-foto
Facts & Events Transfer – StoriesDrone logistics, recycling of building material and wastewater reuse: these ideas are to be tested in so-called “Reallaboren” (Real-World…→
© TU Berlin / allefarben-foto
Facts & Events Transfer – StoriesDrone logistics, recycling of building material and wastewater reuse: these ideas are to be tested in so-called “Reallaboren” (Real-World…→Three Real-World Laboratories are being Launched in Berlin
-
Facts & Events Transfer – Stories
 © Stefan Klenke / HU Berlin
Facts & Events Transfer – StoriesBerlin-based battery researcher Prof. Dr. Philipp Adelhelm has been awarded the 2024 Berlin Science Award. Prof. Dr. Inka Mai from TU Berlin received…→
© Stefan Klenke / HU Berlin
Facts & Events Transfer – StoriesBerlin-based battery researcher Prof. Dr. Philipp Adelhelm has been awarded the 2024 Berlin Science Award. Prof. Dr. Inka Mai from TU Berlin received…→Prof. Dr. Philipp Adelhelm honored with Berlin Science Award
-
Insights Transfer – Stories
 © Gorodenkoff / Shutterstock.com
Insights Transfer – StoriesBrain City Interview: Prof. Dr. Petra Ritter gives an insight into the cross-border project TEF-Health.→
© Gorodenkoff / Shutterstock.com
Insights Transfer – StoriesBrain City Interview: Prof. Dr. Petra Ritter gives an insight into the cross-border project TEF-Health.→European test infrastructure for AI in healthcare
-
Insights Transfer – Stories
 © HTW Berlin/Alexander Rentsch
Insights Transfer – StoriesThe KI-Werkstatt at the HTW Berlin brings together the university’s expertise in an interdisciplinary manner to research the practical use of AI.→
© HTW Berlin/Alexander Rentsch
Insights Transfer – StoriesThe KI-Werkstatt at the HTW Berlin brings together the university’s expertise in an interdisciplinary manner to research the practical use of AI.→Strengthening generative AI in research and teaching
-
Facts & Events Transfer – Stories
") © DLR (CC BY-NC-ND 3.0)
Facts & Events Transfer – StoriesWith the newly founded institute, the German Aerospace Center is pooling its expertise in the field of space instruments and space research in Brain…→
© DLR (CC BY-NC-ND 3.0)
Facts & Events Transfer – StoriesWith the newly founded institute, the German Aerospace Center is pooling its expertise in the field of space instruments and space research in Brain…→New DLR Institute of Space Research
-
Startup Transfer – Stories
 © theion
Startup Transfer – StoriesThe start-up theion wants to revolutionise the battery market and accelerate the energy transition with a new technology in Brain City Berlin.→
© theion
Startup Transfer – StoriesThe start-up theion wants to revolutionise the battery market and accelerate the energy transition with a new technology in Brain City Berlin.→“Batteries made in Germany, made in Berlin”
-
Insights Transfer – Stories
 © Berlin University Alliance / Stefan Klenke
Insights Transfer – StoriesWith the innovate! lab, the Berlin University Alliance (BUA) aims to bring cutting-edge research into practice quickly and purposefully. Dr.…→
© Berlin University Alliance / Stefan Klenke
Insights Transfer – StoriesWith the innovate! lab, the Berlin University Alliance (BUA) aims to bring cutting-edge research into practice quickly and purposefully. Dr.…→“Research transfer through agility”
-
Facts & Events Transfer – Stories
 © Berlin Partner / eventfotografen.berlin
Facts & Events Transfer – StoriesOn March 4, a total of 19 universities, colleges and non-university research institutions signed the statutes of UNITE Sciences e.V.→
© Berlin Partner / eventfotografen.berlin
Facts & Events Transfer – StoriesOn March 4, a total of 19 universities, colleges and non-university research institutions signed the statutes of UNITE Sciences e.V.→UNITE Sciences: Accelerating technology transfer
-
Facts & Events Transfer – Stories
 © IHK Berlin
Facts & Events Transfer – StoriesTU Berlin and IHK Berlin want to work closely together to promote university spin-offs and innovation in Brain City Berlin. An agreement has now been…→
© IHK Berlin
Facts & Events Transfer – StoriesTU Berlin and IHK Berlin want to work closely together to promote university spin-offs and innovation in Brain City Berlin. An agreement has now been…→Cooperation agreement between TU Berlin and IHK Berlin signed
-
Insights Transfer – Stories
 © BettaF!sh/Valentin Pellio
Insights Transfer – StoriesThe start-up BettaF!sh develops and produces the world's first authentic seaweed-based fish alternatives in Brain City Berlin.→
© BettaF!sh/Valentin Pellio
Insights Transfer – StoriesThe start-up BettaF!sh develops and produces the world's first authentic seaweed-based fish alternatives in Brain City Berlin.→“We are breaking new ground with everything we do”
-
Insights Transfer – Stories
 © Berlin Partner/Eventfotografen
Insights Transfer – StoriesThe research landscape in Berlin and Brandenburg is excellent but quite fragmented. The UNITE consortium aims to change that.→
© Berlin Partner/Eventfotografen
Insights Transfer – StoriesThe research landscape in Berlin and Brandenburg is excellent but quite fragmented. The UNITE consortium aims to change that.→UNITE: Fostering Synergies, Accelerating Innovations
-
Facts & Events Transfer – Stories
 © Berlin Partner
Facts & Events Transfer – StoriesThe fourth Transfer Week Berlin-Brandenburg from November 25 to 29 will focus on the latest developments in regional transfer activities. 62 partner…→
© Berlin Partner
Facts & Events Transfer – StoriesThe fourth Transfer Week Berlin-Brandenburg from November 25 to 29 will focus on the latest developments in regional transfer activities. 62 partner…→The future of knowledge transfer: Transfer Week 2024
-
Insights Transfer – Stories
 CCC © Michael Reinhardt
Insights Transfer – StoriesBrain City Interview with Dr. Anita Dame, Managing Director of the Climate Change Center Berlin Brandenburg.→
CCC © Michael Reinhardt
Insights Transfer – StoriesBrain City Interview with Dr. Anita Dame, Managing Director of the Climate Change Center Berlin Brandenburg.→“Climate transformation is a marathon”
-
Facts & Events Transfer – Stories
 © CeRRI 2024
Facts & Events Transfer – StoriesTransfer activities and research do not compete with each other. On the contrary! This is one of the key findings of the “Transfer 1000” study…→
© CeRRI 2024
Facts & Events Transfer – StoriesTransfer activities and research do not compete with each other. On the contrary! This is one of the key findings of the “Transfer 1000” study…→„Transfer 1000“: Study on science transfer
-
Insights Transfer – Stories
 © edelviz
Insights Transfer – StoriesBrain City interview with Lia Carlucci, Managing Director of the Food Campus Berlin. She tells us more about the current status of the project - and…→
© edelviz
Insights Transfer – StoriesBrain City interview with Lia Carlucci, Managing Director of the Food Campus Berlin. She tells us more about the current status of the project - and…→“Collaboration instead of competition”
-
Facts & Events Transfer – Stories
 © HTW/ZfS
Facts & Events Transfer – StoriesClimate, health and sustainability – these are the main topics of Transferale. From 25 to 27 September, the science and transfer festival will be held…→
© HTW/ZfS
Facts & Events Transfer – StoriesClimate, health and sustainability – these are the main topics of Transferale. From 25 to 27 September, the science and transfer festival will be held…→Ideas for Berlin’s future
-
Startup Transfer – Stories
 © STOFF2/Kerstin Reisch
Startup Transfer – StoriesBerlin Start-up STOFF2 wants to bring the ‘Zinc Intermediate-step Electrolyser’ (ZZE) to market maturity and is working closely with the TU Berlin to…→
© STOFF2/Kerstin Reisch
Startup Transfer – StoriesBerlin Start-up STOFF2 wants to bring the ‘Zinc Intermediate-step Electrolyser’ (ZZE) to market maturity and is working closely with the TU Berlin to…→The small, subtle intermediate step
-
Insights Transfer – Stories
 © WISTA Management GmbH – www.adlershof.de
Insights Transfer – StoriesThe Adlershof Science and Technology Park is the largest of Berlin’s eleven future locations. The close connection between science and business has…→
© WISTA Management GmbH – www.adlershof.de
Insights Transfer – StoriesThe Adlershof Science and Technology Park is the largest of Berlin’s eleven future locations. The close connection between science and business has…→“We thrive on proximity and exchange”
-
Insights Transfer – Stories
 © Berlin Partner
Insights Transfer – StoriesThe “Additive Manufacturing Berlin Brandenburg” (AMBER) cluster aims to accelerate the transfer of results from cutting-edge research into…→
© Berlin Partner
Insights Transfer – StoriesThe “Additive Manufacturing Berlin Brandenburg” (AMBER) cluster aims to accelerate the transfer of results from cutting-edge research into…→AMBER: Networking cutting-edge research and industry
-
Insights Transfer – Stories
 © Kai Müller Photography
Insights Transfer – StoriesA newspaper interview provided the impetus for founding the start-up. Brain City interview with airpuls founder Prof. Dr.-Ing. habil. Slawomir…→
© Kai Müller Photography
Insights Transfer – StoriesA newspaper interview provided the impetus for founding the start-up. Brain City interview with airpuls founder Prof. Dr.-Ing. habil. Slawomir…→airpuls: 5G solutions from research
-
Insights Transfer – Stories
 Shutterstock © optimarc
Insights Transfer – StoriesWith a new transfer certificate, the TU Berlin certifies practical skills for students who have dealt with methods and issues of knowledge and…→
Shutterstock © optimarc
Insights Transfer – StoriesWith a new transfer certificate, the TU Berlin certifies practical skills for students who have dealt with methods and issues of knowledge and…→Thinking outside the box
-
Insights Transfer – Stories Innovations
 © Berlin Partner
Insights Transfer – Stories InnovationsQuantum technology is considered to be the next big technological leap. The Brain City Berlin offers ideal conditions for this.→
© Berlin Partner
Insights Transfer – Stories InnovationsQuantum technology is considered to be the next big technological leap. The Brain City Berlin offers ideal conditions for this.→BERLIN QUANTUM: a new initiative for quantum technologies
-
Insights Transfer – Stories
 Design © Sarah Engler; Foto © Alexander Bob
Insights Transfer – StoriesBrain City Interview with Prof. Dr. Uwe Bettig. As Professor of Management and Business Administration at ASH Berlin, he heads the IFAF project…→
Design © Sarah Engler; Foto © Alexander Bob
Insights Transfer – StoriesBrain City Interview with Prof. Dr. Uwe Bettig. As Professor of Management and Business Administration at ASH Berlin, he heads the IFAF project…→Many creative ideas and approaches
-
Insights Transfer – Stories
 © Ivar Veermae
Insights Transfer – StoriesAt EINS in Berlin-Charlottenburg, the TU Berlin supports start-ups that meet global challenges sustainably in three ways. Universities and colleges…→
© Ivar Veermae
Insights Transfer – StoriesAt EINS in Berlin-Charlottenburg, the TU Berlin supports start-ups that meet global challenges sustainably in three ways. Universities and colleges…→Economical, ecological, social
-
Facts & Events Transfer – Stories
 TU Berlin © Felix Noak
Facts & Events Transfer – StoriesInterdisciplinary research teams have until 29 April to submit their proposals for the Next Grand Challenge initiative of the Berlin University…→
TU Berlin © Felix Noak
Facts & Events Transfer – StoriesInterdisciplinary research teams have until 29 April to submit their proposals for the Next Grand Challenge initiative of the Berlin University…→Next Grand Challenge: apply now!
-
Facts & Events Transfer – Stories
") © Alfred-Wegener-Institut/Micheal Gutsche (CC-BY 4.0)
Facts & Events Transfer – StoriesA special exhibition at the Deutsches Technikmuseum makes things crystal clear: There is little time left to save the Arctic.→
© Alfred-Wegener-Institut/Micheal Gutsche (CC-BY 4.0)
Facts & Events Transfer – StoriesA special exhibition at the Deutsches Technikmuseum makes things crystal clear: There is little time left to save the Arctic.→Exhibition tip: “Thin ice”
-
Insights Transfer – Stories
 © Zukunftsorte Berlin
Insights Transfer – StoriesAn interview with Brain City Ambassador Steffen Terberl, Head of the Zukunftsorte Berlin office.→
© Zukunftsorte Berlin
Insights Transfer – StoriesAn interview with Brain City Ambassador Steffen Terberl, Head of the Zukunftsorte Berlin office.→“So that innovation history can be written in Berlin again”
-
Insights Transfer – Stories
 © BHT-MINT-VR-Labs
Insights Transfer – StoriesAt the MINT VR labs at the Berliner Hochschule für Technik, an interdisciplinary team works on didactic concepts for virtual laboratories and…→
© BHT-MINT-VR-Labs
Insights Transfer – StoriesAt the MINT VR labs at the Berliner Hochschule für Technik, an interdisciplinary team works on didactic concepts for virtual laboratories and…→Learning through play in the virtual bio-lab
-
Facts & Events Transfer – Stories
© BPWT
Facts & Events Transfer – StoriesWith an all-day kick-off conference in the stilwerk KantGaragen, the Transfer Week Berlin-Brandenburg 2023 starts. From 20 to 24 November, the event…→
“Science x Business”: Transfer Week 2023
-
Insights Transfer – Stories
 © edelVIZ
Insights Transfer – StoriesFrom 2024, the Food Campus Berlin is due to be built in Berlin’s industrial Tempelhof-Ost region. The Science Park will be focussing on nutrition and…→
© edelVIZ
Insights Transfer – StoriesFrom 2024, the Food Campus Berlin is due to be built in Berlin’s industrial Tempelhof-Ost region. The Science Park will be focussing on nutrition and…→Think Tank for the food of the future
-
Insights Transfer – Stories
 © Berlin Partner/Wüstenhagen
Insights Transfer – StoriesThe focus is on the science location, the science and technology transfer that is characteristic of Berlin – and of course the Brain City Ambassadors.…→
© Berlin Partner/Wüstenhagen
Insights Transfer – StoriesThe focus is on the science location, the science and technology transfer that is characteristic of Berlin – and of course the Brain City Ambassadors.…→Brain City Berlin launches new campaign motifs
-
Facts & Events Transfer – Stories
 © Falling Walls Foundation
Facts & Events Transfer – StoriesBerlin Science Week is back from November 1 to 10. New this year: The ART & SCIENCE FORUM at Holzmarkt 25 is the central location of the science…→
© Falling Walls Foundation
Facts & Events Transfer – StoriesBerlin Science Week is back from November 1 to 10. New this year: The ART & SCIENCE FORUM at Holzmarkt 25 is the central location of the science…→With a focus on art & science: Berlin Science Week 2023
-
Facts & Events Transfer – Stories
 © Peter Himsel/Campus Berlin-Buch GmbH
Facts & Events Transfer – StoriesBrain City Berlin has a new start-up centre: The BerlinBioCube on the Campus Berlin-Buch includes 8,000 square metres of modern laboratory and office…→
© Peter Himsel/Campus Berlin-Buch GmbH
Facts & Events Transfer – StoriesBrain City Berlin has a new start-up centre: The BerlinBioCube on the Campus Berlin-Buch includes 8,000 square metres of modern laboratory and office…→The BerlinBioCube is open
-
Insights Transfer – Stories
 © Gisma
Insights Transfer – StoriesThe Gisma University of Applied Sciences has had a campus in the Brain City Berlin since 2017. More than 660 students from all over the world are…→
© Gisma
Insights Transfer – StoriesThe Gisma University of Applied Sciences has had a campus in the Brain City Berlin since 2017. More than 660 students from all over the world are…→Giving impulses to the economy
-
Facts & Events Transfer – Stories
 © HU Berlin
Facts & Events Transfer – Stories“TRAIN 4 Science” encourages children, but also adults, to deal with climate change in a playful way. The app was developed in the Brain City Berlin…→
© HU Berlin
Facts & Events Transfer – Stories“TRAIN 4 Science” encourages children, but also adults, to deal with climate change in a playful way. The app was developed in the Brain City Berlin…→On the virtual train to a sustainable future
-
Insights Transfer – Stories
 © HTW Berlin/Alexander Rentsch
Insights Transfer – StoriesAt the business and science location Berlin Schöneweide, tradition meets the ideas and solutions of tomorrow. The scientific nucleus of the area: the…→
© HTW Berlin/Alexander Rentsch
Insights Transfer – StoriesAt the business and science location Berlin Schöneweide, tradition meets the ideas and solutions of tomorrow. The scientific nucleus of the area: the…→A place of innovation and transformation
-
Insights Transfer – Stories
 © vdo
Insights Transfer – StoriesProf. Dr. Claus Bull and Dipl.-Ing. Dirk Jäger at the Berliner Hochschule für Technik are investigating what street trees need to survive and how they…→
© vdo
Insights Transfer – StoriesProf. Dr. Claus Bull and Dipl.-Ing. Dirk Jäger at the Berliner Hochschule für Technik are investigating what street trees need to survive and how they…→“The trees in the city have a lot to put up with”
-
Insights Transfer – Stories
 © LAS Art Foundation/Juan Camilo Roan
Insights Transfer – Stories‘Pollinator Pathmaker’ is the name given to the living work of art that is currently flowering, buzzing and fluttering in front of the Museum für…→
© LAS Art Foundation/Juan Camilo Roan
Insights Transfer – Stories‘Pollinator Pathmaker’ is the name given to the living work of art that is currently flowering, buzzing and fluttering in front of the Museum für…→Garden art from an insect’s perspective
-
Insights Transfer – Stories
 © HTW Berlin/Alexander Rentsch
Insights Transfer – StoriesThe project "Zukunft findet Stadt - Hochschulnetzwerk für ein resilientes Berlin" is something that is so far unique for Berlin. Project leader Prof.…→
© HTW Berlin/Alexander Rentsch
Insights Transfer – StoriesThe project "Zukunft findet Stadt - Hochschulnetzwerk für ein resilientes Berlin" is something that is so far unique for Berlin. Project leader Prof.…→"We want innovations that are created in Berlin to be implemented here"
-
Facts & Events Transfer – Stories
 © BHT/Zarko Martovic
Facts & Events Transfer – StoriesOn 17 June, more than 60 scientific and science-related institutions in the Brain City Berlin and Potsdam will open their doors for the “Long Night of…→
© BHT/Zarko Martovic
Facts & Events Transfer – StoriesOn 17 June, more than 60 scientific and science-related institutions in the Brain City Berlin and Potsdam will open their doors for the “Long Night of…→Lange Nacht der Wissenschaften 2023
-
Facts & Events Transfer – Stories
 © BSBI
Facts & Events Transfer – StoriesOn 24 June the AI scene will meet in Berlin-Neukölln. The “1st International Conference on Artificial Intelligence” at the BSBI is primarily about the…→
© BSBI
Facts & Events Transfer – StoriesOn 24 June the AI scene will meet in Berlin-Neukölln. The “1st International Conference on Artificial Intelligence” at the BSBI is primarily about the…→AI Conference at the Berlin School of Business & Innovation
-
Startup Transfer – Stories
 © Quantistry
Startup Transfer – StoriesThe Berlin start-up Quantistry makes chemical experiments in digital space possible with the help of Artificial Intelligence and quantum chemical…→
© Quantistry
Startup Transfer – StoriesThe Berlin start-up Quantistry makes chemical experiments in digital space possible with the help of Artificial Intelligence and quantum chemical…→The chemistry lab in the cloud
-
Insights Transfer – Stories
 © Hallbauer & Fioretti
Insights Transfer – StoriesBrain City interview: Prof. Dr. Emmanuelle Charpentier, Nobel Laureate and Managing Director of the Max Planck Unit for the Science of Pathogens.→
© Hallbauer & Fioretti
Insights Transfer – StoriesBrain City interview: Prof. Dr. Emmanuelle Charpentier, Nobel Laureate and Managing Director of the Max Planck Unit for the Science of Pathogens.→"Basic research is the basis for innovation"
-
Facts & Events Transfer – Stories
 © BVG/Andreas Süß
Facts & Events Transfer – StoriesWhat does an electric bus sound like? Lukas Esser, a student at Berlin University of the Arts, has developed the new sound for Germany’s electric…→
© BVG/Andreas Süß
Facts & Events Transfer – StoriesWhat does an electric bus sound like? Lukas Esser, a student at Berlin University of the Arts, has developed the new sound for Germany’s electric…→Electric sound of the future
-
Insights Transfer – Stories
 © ASH Berlin/Cristián Pérez
Insights Transfer – StoriesThe acronym SAGE, in German stands for Social Work, Health, Education and Training. Prof. Bettina Völter, Rector at the ASH Berlin, tells us more…→
© ASH Berlin/Cristián Pérez
Insights Transfer – StoriesThe acronym SAGE, in German stands for Social Work, Health, Education and Training. Prof. Bettina Völter, Rector at the ASH Berlin, tells us more…→SAGE – a social three-way alliance
-
Facts & Events Transfer – Stories
 © Maschinenraum
Facts & Events Transfer – StoriesThe University of Applied Sciences wants to tap additional transfer potential by means of cooperation with the nationwide network of SMEs.→
© Maschinenraum
Facts & Events Transfer – StoriesThe University of Applied Sciences wants to tap additional transfer potential by means of cooperation with the nationwide network of SMEs.→HTW Berlin cooperates with Maschinenraum
-
Insights Transfer – Stories
 © QAH
Insights Transfer – StoriesThe "Zukunftsort" Technology Park Humboldthain represents the heyday of Berlin’s industrial history, but also stands for successful synergies between…→
© QAH
Insights Transfer – StoriesThe "Zukunftsort" Technology Park Humboldthain represents the heyday of Berlin’s industrial history, but also stands for successful synergies between…→Tradition meets innovation
-
Insights Transfer – Stories
 © Stefan Schostok
Insights Transfer – StoriesA guest article from Brain City Ambassador Prof. Dr. Selin Arikoglu, Professor of child and youth welfare at the Catholic University of Applied Social…→
© Stefan Schostok
Insights Transfer – StoriesA guest article from Brain City Ambassador Prof. Dr. Selin Arikoglu, Professor of child and youth welfare at the Catholic University of Applied Social…→Giving a scientific voice to the relatives of prisoners
-
Facts & Events Transfer – Stories
 © Berlin Partner
Facts & Events Transfer – StoriesWith a new image film Brain City Berlin starts the year 2023. Our Brain City Ambassadors are the protagonists of the video.→
© Berlin Partner
Facts & Events Transfer – StoriesWith a new image film Brain City Berlin starts the year 2023. Our Brain City Ambassadors are the protagonists of the video.→“We are Brain City Berlin”
-
Insights Transfer – Stories
 © HWR Berlin/ Franziska Ihle
Insights Transfer – StoriesWith the project “KlinKe”, Prof. Dr. Silke Bustamante and her colleague Prof. Dr. Andrea Pelzeter at the HWR Berlin are researching which of the…→
© HWR Berlin/ Franziska Ihle
Insights Transfer – StoriesWith the project “KlinKe”, Prof. Dr. Silke Bustamante and her colleague Prof. Dr. Andrea Pelzeter at the HWR Berlin are researching which of the…→On the way to becoming a climate-neutral hospital
-
Facts & Events Transfer – Stories
 © Transfer Week
Facts & Events Transfer – StoriesFrom 21 to 25 November, scientists can once again discuss future-oriented topics on a practical level together with companies from Berlin and…→
© Transfer Week
Facts & Events Transfer – StoriesFrom 21 to 25 November, scientists can once again discuss future-oriented topics on a practical level together with companies from Berlin and…→Providing impulses for cooperation: Transfer Week 2022
-
Facts & Events Transfer – Stories
 © Falling Walls Foundation
Facts & Events Transfer – StoriesAn interview with Christine Brummer, director of Berlin Science Week.→
© Falling Walls Foundation
Facts & Events Transfer – StoriesAn interview with Christine Brummer, director of Berlin Science Week.→Opening up science for dialogue with society
-
Insights Transfer – Stories
 Shutterstock © Monster Ztudio
Insights Transfer – StoriesWith the help of Artificial Intelligence, the research project “news-polygraph”, anchored in the Brain City Berlin, aims to identify manipulated media…→
Shutterstock © Monster Ztudio
Insights Transfer – StoriesWith the help of Artificial Intelligence, the research project “news-polygraph”, anchored in the Brain City Berlin, aims to identify manipulated media…→“news-polygraph”: Funding by the BMBF
-
Insights Transfer – Stories
 © Felix Noak
Insights Transfer – StoriesBrain City interview with Dr. phil. Thorsten Philipp, Advisor Transdisciplinary Teaching in the Office of the Vice Presidents of TU Berlin.→
© Felix Noak
Insights Transfer – StoriesBrain City interview with Dr. phil. Thorsten Philipp, Advisor Transdisciplinary Teaching in the Office of the Vice Presidents of TU Berlin.→“Everybody knows something”
-
Insights Transfer – Stories
 @ Ernestine von der Osten-Sacken
Insights Transfer – StoriesListening to sounds like the bat: On "Sound Walk" with Hannes Hoelzl, sound artist and lecturer for Generative Arts/Computational Arts at the UdK…→
@ Ernestine von der Osten-Sacken
Insights Transfer – StoriesListening to sounds like the bat: On "Sound Walk" with Hannes Hoelzl, sound artist and lecturer for Generative Arts/Computational Arts at the UdK…→Seeing with the Ears
-
Transfer – Stories
 Image: Shutterstock © Yurchanka Siarhei
Transfer – StoriesThe Berlin AI Competence Centre BIFOLD will receive 22 million Euro annually in the future from the Federal government and the State of Berlin.→
Image: Shutterstock © Yurchanka Siarhei
Transfer – StoriesThe Berlin AI Competence Centre BIFOLD will receive 22 million Euro annually in the future from the Federal government and the State of Berlin.→Millions in Funding for AI Research in Berlin
-
Transfer – Stories
 Falling Walls Foundation © Judith Schalansky
Transfer – StoriesFrom November 1st through the 10th, the scientific world comes together again in Brain City Berlin. Scientific institutions or organisations can still…→
Falling Walls Foundation © Judith Schalansky
Transfer – StoriesFrom November 1st through the 10th, the scientific world comes together again in Brain City Berlin. Scientific institutions or organisations can still…→“Dare to know”: Berlin Science Week 2022
-
Transfer – Stories
 EUREF AG©Gasometertour.de
Transfer – StoriesOn the site of the EUREF-Campus in Berlin-Schoeneberg the transfer of knowledge works particularly impressively.→
EUREF AG©Gasometertour.de
Transfer – StoriesOn the site of the EUREF-Campus in Berlin-Schoeneberg the transfer of knowledge works particularly impressively.→Hands-on Energy Transition
-
Transfer – Stories
 © SCC Events/Norbert Wilhelmi
Transfer – StoriesInterview with Brain City Ambassador Prof. Dr. Gabriele Mielke, Vice President of the VICTORIA | International University of Applied Sciences and also…→
© SCC Events/Norbert Wilhelmi
Transfer – StoriesInterview with Brain City Ambassador Prof. Dr. Gabriele Mielke, Vice President of the VICTORIA | International University of Applied Sciences and also…→"Major Events Affect Life in the City on Different Levels”
-
Transfer – Stories
") Photo: Ernestine von der Osten-Sacken (vdo)
Transfer – StoriesThe Charlottenburg Innovation Centre CHIC hosts around 50 start-ups. Situated at Brain City Berlin’s “Zukunftsort” Campus Charlottenburg, the CHIC…→
Photo: Ernestine von der Osten-Sacken (vdo)
Transfer – StoriesThe Charlottenburg Innovation Centre CHIC hosts around 50 start-ups. Situated at Brain City Berlin’s “Zukunftsort” Campus Charlottenburg, the CHIC…→CHIC - Business Incubator at a "Zukunftsort’"
-
Transfer – Stories
 Photo: Mall Anders/Matthew Crabbe
Transfer – Stories“Mall Anders” is an open learning laboratory which was launched by the FU Berlin, HU Berlin, TU Berlin and Charité – Universitätsmedizin Berlin in a…→
Photo: Mall Anders/Matthew Crabbe
Transfer – Stories“Mall Anders” is an open learning laboratory which was launched by the FU Berlin, HU Berlin, TU Berlin and Charité – Universitätsmedizin Berlin in a…→Science in a Shopping Centre
-
Transfer – Stories
 Prof. Christian Matzdorf, Police commissioner Turgay Akkaya, Stefan Graf Finck von Finckenstein, Photo: HWR Berlin / Sylke Schumann") (Left to right) Prof. Christian Matzdorf, Police commissioner Turgay Akkaya, Stefan Graf Finck von Finckenstein, Photo: HWR Berlin / Sylke Schumann
Transfer – StoriesPolice commissioner Turgay Akkaya has developed an anti-stalking app as part of his Bachelor’s project at the HWR Berlin. At the beginning of January…→
(Left to right) Prof. Christian Matzdorf, Police commissioner Turgay Akkaya, Stefan Graf Finck von Finckenstein, Photo: HWR Berlin / Sylke Schumann
Transfer – StoriesPolice commissioner Turgay Akkaya has developed an anti-stalking app as part of his Bachelor’s project at the HWR Berlin. At the beginning of January…→A Preventive App Against Stalking
-
Transfer – Stories
 Steffen Terberl/FU Berlin; Prof. Dr. Hannes Rothe/ICN Business School, photo: Ernestine von der Osten-Sacken") (From left to right) Steffen Terberl/FU Berlin; Prof. Dr. Hannes Rothe/ICN Business School, photo: Ernestine von der Osten-Sacken
Transfer – StoriesIn the BioTech sector, the Berlin region is not making full use of its innovation potential. This is the conclusion of the “Deep Tech Futures Report…→
(From left to right) Steffen Terberl/FU Berlin; Prof. Dr. Hannes Rothe/ICN Business School, photo: Ernestine von der Osten-Sacken
Transfer – StoriesIn the BioTech sector, the Berlin region is not making full use of its innovation potential. This is the conclusion of the “Deep Tech Futures Report…→“BioTech does not get up and running on its own”
-
Transfer – Stories
") Photo: Christina Lüdtke (private source)
Transfer – StoriesFour universities, one network: The network “Science & Startups” groups the start-up services of the universities united in the Berlin University…→
Photo: Christina Lüdtke (private source)
Transfer – StoriesFour universities, one network: The network “Science & Startups” groups the start-up services of the universities united in the Berlin University…→Wide-ranging Support for University Start-ups
-
Transfer – Stories
 Photo: private
Transfer – StoriesA guest contribution by Brain City Ambassador Dr. Anna Klippstein, professor of finance and Eliyahu Mätzschker, student at Touro College Berlin.→
Photo: private
Transfer – StoriesA guest contribution by Brain City Ambassador Dr. Anna Klippstein, professor of finance and Eliyahu Mätzschker, student at Touro College Berlin.→The Pandemic and its Impact on the Capital Market
-
Transfer – Stories
 Credit: André Bakker
Transfer – StoriesA guest contribution by Brain City Ambassador Prof. Dr Anabel Ternès von Hattburg, Professor for International Business Administration at the SRH…→
Credit: André Bakker
Transfer – StoriesA guest contribution by Brain City Ambassador Prof. Dr Anabel Ternès von Hattburg, Professor for International Business Administration at the SRH…→Getting on Board with Digitality
-
Transfer – Stories
, Gesine Höltmann (Foto: Martina Sander)") Swen Hutter (Foto: David Ausserhofer), Gesine Höltmann (Foto: Martina Sander)
Transfer – StoriesA guest contribution by Gesine Höltmann, research assistant and Swen Hutter, Deputy Director at the Centre for Civil Society Research.→
Swen Hutter (Foto: David Ausserhofer), Gesine Höltmann (Foto: Martina Sander)
Transfer – StoriesA guest contribution by Gesine Höltmann, research assistant and Swen Hutter, Deputy Director at the Centre for Civil Society Research.→Polarisation and Cohesion in the Corona Crisis: a Look at Civil Society
-
Transfer – Stories
 Foto: "Lucid Dream", Elena Kunau and Mariya Yordanova
Transfer – StoriesARTIFICIAL REALITY – VIRTUAL INTELLIGENCE is the name of an exhibition that can be seen from 8 to 12 September as part of Ars Electronica Garden…→
Foto: "Lucid Dream", Elena Kunau and Mariya Yordanova
Transfer – StoriesARTIFICIAL REALITY – VIRTUAL INTELLIGENCE is the name of an exhibition that can be seen from 8 to 12 September as part of Ars Electronica Garden…→Interaction via Emotion
-
Transfer – Stories
 Credit: Peter Himsel/Campus Berlin-Buch GmbH
Transfer – StoriesThe Campus Berlin-Buch in the north of Brain City Berlin has grown to become one of Europe’s largest business and research centres for life sciences.→
Credit: Peter Himsel/Campus Berlin-Buch GmbH
Transfer – StoriesThe Campus Berlin-Buch in the north of Brain City Berlin has grown to become one of Europe’s largest business and research centres for life sciences.→A Vibrant Healthcare Network
-
Transfer – Stories
 Credit: Markus Krutzik
Transfer – StoriesDr. Markus Krutzik, Head of the Joint Lab Integrated Quantum Sensors (IQS), on the "Wissenschaft trifft Wirtschaft" (Science Meets Business") event…→
Credit: Markus Krutzik
Transfer – StoriesDr. Markus Krutzik, Head of the Joint Lab Integrated Quantum Sensors (IQS), on the "Wissenschaft trifft Wirtschaft" (Science Meets Business") event…→"I am Fascinated by the Possibilities of Quantum Sensors"
-
Transfer – Stories
 Foto: ESCP Business School Berlin
Transfer – StoriesWhat to do when distance is suddenly the order of the day? A guest contribution by Dr. René Mauer, Professor of Entrepreneurship und Innovation at…→
Foto: ESCP Business School Berlin
Transfer – StoriesWhat to do when distance is suddenly the order of the day? A guest contribution by Dr. René Mauer, Professor of Entrepreneurship und Innovation at…→Using Whiteboards to Combat Digital Fatigue
-
Transfer – Stories
 Credit: Alexander Rentsch/HTW Berlin
Transfer – StoriesBrain City Ambassador Prof. Dr. Florian Koch of HTW Berlin brings together science, business and civil society in his research.→
Credit: Alexander Rentsch/HTW Berlin
Transfer – StoriesBrain City Ambassador Prof. Dr. Florian Koch of HTW Berlin brings together science, business and civil society in his research.→“Increasing Urbanisation also Creates Opportunities”
-
Transfer – Stories
 Credit: Rudolf Grillborzer
Transfer – StoriesGuest contribution by Brain City Ambassador Dr.-Ing. Onur Günlü, Technische Universität Berlin.→
Credit: Rudolf Grillborzer
Transfer – StoriesGuest contribution by Brain City Ambassador Dr.-Ing. Onur Günlü, Technische Universität Berlin.→Exploring the "ultimate limits"
-
Transfer – Stories
 Credt: Startup Incubator Berlin
Transfer – StoriesThe Startup Incubator Berlin at the Berlin School of Economics and Law is particularly successful in supporting founder teams – as proved by the fact…→
Credt: Startup Incubator Berlin
Transfer – StoriesThe Startup Incubator Berlin at the Berlin School of Economics and Law is particularly successful in supporting founder teams – as proved by the fact…→“We Bring Ideas to Market”
-
Transfer – Stories
 Credit: Mimi Thian on Unsolash
Transfer – StoriesGuest Contribution by Brain City Ambassador Dr. Petyo Budakov, University of Europe for Applied Sciences.→
Credit: Mimi Thian on Unsolash
Transfer – StoriesGuest Contribution by Brain City Ambassador Dr. Petyo Budakov, University of Europe for Applied Sciences.→“Proudly presenting Brain City Berlin in 2020”
-
Transfer – Stories
") Susanne Plaumann (private)
Transfer – StoriesInterview with Brain City Ambassador Susanne Plaumann M.A., Central women's representative at the Beuth University of Applied Sciences Berlin.→
Susanne Plaumann (private)
Transfer – StoriesInterview with Brain City Ambassador Susanne Plaumann M.A., Central women's representative at the Beuth University of Applied Sciences Berlin.→“Careers are now easier to plan for women scientists”
-
Transfer – Stories
 Adi Goldstein auf Unsplash
Transfer – StoriesStadtManufaktur Berlin conceptually unites research projects of the TU Berlin under a single roof. The long-term goal of this “open laboratory…→
Adi Goldstein auf Unsplash
Transfer – StoriesStadtManufaktur Berlin conceptually unites research projects of the TU Berlin under a single roof. The long-term goal of this “open laboratory…→Science in Dialogue with the City
-
Transfer – Stories
 Falk Weiß
Transfer – StoriesThe knowledge portal “humboldts17” presents current research on the subject of sustainability and welcomes open dialogue with the general public. The…→
Falk Weiß
Transfer – StoriesThe knowledge portal “humboldts17” presents current research on the subject of sustainability and welcomes open dialogue with the general public. The…→17 Goals for the Future
-
Transfer – Stories
 Foto: Olga Makarova privat
Transfer – StoriesBrain City Ambassador Olga Makarova reflects on being a microbiologist during the pandemic, and the urgent need for microbiology literacy in society.→
Foto: Olga Makarova privat
Transfer – StoriesBrain City Ambassador Olga Makarova reflects on being a microbiologist during the pandemic, and the urgent need for microbiology literacy in society.→Guest Contribution: COVID-19 and microbiology literacy
-
Transfer – Stories
 HIIG
Transfer – StoriesBrain City-Interview with Prof. Dr. Wolfgang Schulz, Research Director at the Alexander von Humboldt Institute for Internet and Society (HIIG).→
HIIG
Transfer – StoriesBrain City-Interview with Prof. Dr. Wolfgang Schulz, Research Director at the Alexander von Humboldt Institute for Internet and Society (HIIG).→“A sustainable goal of our work is to make clear what the technology can actually do”
-
Transfer – Stories
 HTW Berlin
Transfer – StoriesAn interview with Brain City Ambassador Prof. Dr. Kai Reinhardt. On October 28, he will be speaking at the second SpreeTalk at HTW University of…→
HTW Berlin
Transfer – StoriesAn interview with Brain City Ambassador Prof. Dr. Kai Reinhardt. On October 28, he will be speaking at the second SpreeTalk at HTW University of…→“The pandemic has been a catalyst for digitalization”
-
Transfer – Stories
 dentalXr.ai
Transfer – StoriesdentalXrai is the first dental start-up to be spun off the Charité. It was launched via the accelerator of the Berlin Institute of Health (BIH). We…→
dentalXr.ai
Transfer – StoriesdentalXrai is the first dental start-up to be spun off the Charité. It was launched via the accelerator of the Berlin Institute of Health (BIH). We…→Artificial intelligence in the fight against tooth decay
-
Transfer – Stories
") Anna Raysyan (private)
Transfer – StoriesBrain City Ambassador Anna Raysyan has been living in Berlin for 3,5 years now. She is a PhD student at the Bundesanstalt für Materialforschung und…→
Anna Raysyan (private)
Transfer – StoriesBrain City Ambassador Anna Raysyan has been living in Berlin for 3,5 years now. She is a PhD student at the Bundesanstalt für Materialforschung und…→Guest Contribution: “Berlin likes the bold!”
-
Transfer – Stories
 ©Berlin Partner für Wirtschaft und Technologie
Transfer – StoriesMany top-class researchers and scientists are being attracted to Brain City Berlin every year. The Dual Career Network Berlin helps partners of…→
©Berlin Partner für Wirtschaft und Technologie
Transfer – StoriesMany top-class researchers and scientists are being attracted to Brain City Berlin every year. The Dual Career Network Berlin helps partners of…→Dual Career Network Berlin: getting a good start in Berlin
-
Transfer – Stories
 ©Matthias Picket
Transfer – StoriesDr. Anne Schreiter, Managing Director of the German Scholars Organization (GSO), reveals in the Brain City interview what alternative career…→
©Matthias Picket
Transfer – StoriesDr. Anne Schreiter, Managing Director of the German Scholars Organization (GSO), reveals in the Brain City interview what alternative career…→"Science is not just about research"
-
Transfer – Stories
 © Pocky Lee on Unsplash
Transfer – StoriesMatches in front of empty stadiums, virtual marathons, and many postponed events. Brain City Ambassador Professor Gabriele Mielke is tracking the…→
© Pocky Lee on Unsplash
Transfer – StoriesMatches in front of empty stadiums, virtual marathons, and many postponed events. Brain City Ambassador Professor Gabriele Mielke is tracking the…→"Now is the time for innovators"
-
Transfer – Stories
 © AW Creative on Unsplash
Transfer – StoriesJuggling a degree course or teaching with the extra burden of the care of children or other family members is not an easy task. Both students and…→
© AW Creative on Unsplash
Transfer – StoriesJuggling a degree course or teaching with the extra burden of the care of children or other family members is not an easy task. Both students and…→From “Zoo School” to “Maternity Protection”: family-friendly universities
-
Transfer – Stories
 © HTW Berlin / Nikolas Fahlbusch
Transfer – StoriesTeaching is currently only taking place online. Guest author Dr Dorothee Haffner, professor for Museology at HTW Berlin - University of Applied…→
© HTW Berlin / Nikolas Fahlbusch
Transfer – StoriesTeaching is currently only taking place online. Guest author Dr Dorothee Haffner, professor for Museology at HTW Berlin - University of Applied…→Guest contribution: "Online teaching is more engaging than I thought"
-
Transfer – Stories
 Franziska Sattler
Transfer – StoriesIn the interview: Brain City ambassador Franziska Sattler on her series of events "Kaffeeklatsch mit Wissenschaft" (Talking Science over Coffee) at…→
Franziska Sattler
Transfer – StoriesIn the interview: Brain City ambassador Franziska Sattler on her series of events "Kaffeeklatsch mit Wissenschaft" (Talking Science over Coffee) at…→"Science needs the trust of society"
-
Transfer – Stories
 Fotocredit: Ortner & Ortner / Siemens
Transfer – StoriesSiemensstadt 2.0 is a place of the future. The Berlin Senate has approved 9.9 million euros for the first research project "Electrical Drive…→
Fotocredit: Ortner & Ortner / Siemens
Transfer – StoriesSiemensstadt 2.0 is a place of the future. The Berlin Senate has approved 9.9 million euros for the first research project "Electrical Drive…→Siemensstadt 2.0: Research and industry closely linked
-
Transfer – Stories
 ©Credit Silke Oßwald/FMP
Transfer – StoriesBrain City interview: Professor Dr. Volker Haucke, Director at the Leibniz-Forschungsinstitut für Molekulare Pharmakologie (FMP) and Professor of…→
©Credit Silke Oßwald/FMP
Transfer – StoriesBrain City interview: Professor Dr. Volker Haucke, Director at the Leibniz-Forschungsinstitut für Molekulare Pharmakologie (FMP) and Professor of…→In the balancing act between detail and overall concept
-
Transfer – Stories
 © hj barraza/Unsplash
Transfer – StoriesOur guest author Dr Barbara Schäuble is Professor for Diversity-Conscious Approaches in the Theory and Practice of Social Work at ASH Berlin and a…→
© hj barraza/Unsplash
Transfer – StoriesOur guest author Dr Barbara Schäuble is Professor for Diversity-Conscious Approaches in the Theory and Practice of Social Work at ASH Berlin and a…→Guest contribution: A sudden change of course - classes moved online
-
Transfer – Stories
 ©DexLeChem
Transfer – StoriesLaunching a start-up while at university? Sonja Jost's success shows the way. Together with three fellow students, she founded DexLeChem after…→
©DexLeChem
Transfer – StoriesLaunching a start-up while at university? Sonja Jost's success shows the way. Together with three fellow students, she founded DexLeChem after…→"Bringing new knowledge to the market is very important to us"
-
Transfer – Stories
 ©Ivar Veermäe / Centre for Entrepreneurship
Transfer – StoriesBrain City Berlin is the German capital of start-ups. Many young companies have successfully been founded through Berlin and Brandenburg based…→
©Ivar Veermäe / Centre for Entrepreneurship
Transfer – StoriesBrain City Berlin is the German capital of start-ups. Many young companies have successfully been founded through Berlin and Brandenburg based…→"Society in particular benefits from high-tech start-ups" - university survey enters its third round
-
Transfer – Stories
 ©BIH|Thomas Rafalzyk
Transfer – StoriesAt the Berlin Institute of Health (BIH) the main focus is on "translational research" - the transfer of findings from the research lab into clinical…→
©BIH|Thomas Rafalzyk
Transfer – StoriesAt the Berlin Institute of Health (BIH) the main focus is on "translational research" - the transfer of findings from the research lab into clinical…→“There are now many great female scientists, achieving great things”
-
Transfer – Stories
 ©fotografixx - istockphoto.com
Transfer – StoriesIn the digital age learning behaviour changes profoundly. It is student-centered and technology rich. As a member of the Erasmus+ funded project…→
©fotografixx - istockphoto.com
Transfer – StoriesIn the digital age learning behaviour changes profoundly. It is student-centered and technology rich. As a member of the Erasmus+ funded project…→Exploring the future of learning
-
Transfer – Stories
 © Brain City Berlin
Transfer – StoriesResearch results quickly and easily accessible online: The Open Access movement is campaigning for a paradigm shift in the field of publications and…→
© Brain City Berlin
Transfer – StoriesResearch results quickly and easily accessible online: The Open Access movement is campaigning for a paradigm shift in the field of publications and…→Open Access: free knowledge for everyone
-
Transfer – Stories
 ©ESCP EUROPE
Transfer – Stories29.10.2019 | Professor Andreas Kaplan is a Brain City Berlin ambassador and Rector of ESCP Europe Business School Berlin. The economist's research is…→
©ESCP EUROPE
Transfer – Stories29.10.2019 | Professor Andreas Kaplan is a Brain City Berlin ambassador and Rector of ESCP Europe Business School Berlin. The economist's research is…→"We have to be able to take everyone on the journey."
-
Transfer – Stories
 Gudrun Piechotta-Henze
Transfer – StoriesIn time for the 2020/21 winter semester, ASH, the Alice Salomon University of Applied Sciences Berlin, is launching the first bachelor's degree to…→
Gudrun Piechotta-Henze
Transfer – StoriesIn time for the 2020/21 winter semester, ASH, the Alice Salomon University of Applied Sciences Berlin, is launching the first bachelor's degree to…→"We have to completely rethink nursing!" | 27.09.2019
-
Transfer – Stories
 ©Humboldt-Universität zu Berlin/Matthias Heyde
Transfer – StoriesThe courses offered by the HUWISU Summer University are varied and exciting, the target group is international: students from abroad who come to…→
©Humboldt-Universität zu Berlin/Matthias Heyde
Transfer – StoriesThe courses offered by the HUWISU Summer University are varied and exciting, the target group is international: students from abroad who come to…→When Berlin becomes one large seminar room ... | 15.08.2019
-
Transfer – Stories
![[Translate to English:]](/fileadmin/_processed_/9/d/csm_bwasihun-vdo_558x314_c0d384ce60.jpg "[Translate to English:]") [Translate to English:]
Transfer – StoriesThe literary scholar Dr. Betiel Wasihun was traveling for science. After stops in Heidelberg, Yale, and Oxford, it brought her to Berlin two years…→
[Translate to English:]
Transfer – StoriesThe literary scholar Dr. Betiel Wasihun was traveling for science. After stops in Heidelberg, Yale, and Oxford, it brought her to Berlin two years…→“Berlin is a perfect location. Especially if you don’t want to pursue just a single avenue of scientific work.” | 12.08.2019
-
Transfer – Stories
![[Translate to English:]](/fileadmin/_processed_/5/a/csm_Berlin_University_Alliance_Matthias_Heyde-558x314_4bc591ca3c.jpg "[Translate to English:] Berlin University Alliance/Matthias Heyde") [Translate to English:] Berlin University Alliance/Matthias Heyde
Transfer – StoriesTogether we are stronger. And also more successful. As the "Berlin University Alliance," the Technische Universität Berlin, the Freie Universität…→
[Translate to English:] Berlin University Alliance/Matthias Heyde
Transfer – StoriesTogether we are stronger. And also more successful. As the "Berlin University Alliance," the Technische Universität Berlin, the Freie Universität…→Congratulations: The “Berlin University Alliance“ receives funding of the Excellence Strategy |19.07.2019
-
Transfer – Stories
![[Translate to English:]](/fileadmin/_processed_/6/f/csm_Hupfer__Michael_____R__David_Ausserhofer_588x314_6fef164e57.jpg "[Translate to English:] David Ausserhofer/IGB") [Translate to English:] David Ausserhofer/IGB
Transfer – StoriesBerlin is one of the most water-rich cities in Germany. But climate change does not stop at the Havel, Spree or Wannsee either. Dr. Michael Hupfer is…→
[Translate to English:] David Ausserhofer/IGB
Transfer – StoriesBerlin is one of the most water-rich cities in Germany. But climate change does not stop at the Havel, Spree or Wannsee either. Dr. Michael Hupfer is…→"We're trying to take a look into the future." | 04.07.2019
-
Transfer – Stories
![[Translate to English:]](/fileadmin/_processed_/b/6/csm_helena-lopes-1338810-unsplash_558x314_857802ad2f.jpg "[Translate to English:] Helena Lopes / Unsplash") [Translate to English:] Helena Lopes / Unsplash
Transfer – StoriesSend a digital lollipop or delicate fragrance notes via email or let the wind virtually blow against your face - research makes it possible. Learn…→
[Translate to English:] Helena Lopes / Unsplash
Transfer – StoriesSend a digital lollipop or delicate fragrance notes via email or let the wind virtually blow against your face - research makes it possible. Learn…→Experiencing the digital world with all senses | 18.06.2019
-
Transfer – Stories
![[Translate to English:]](/fileadmin/_processed_/f/a/csm_LNDW_HZB_558x314_e1e3500ed5.jpg "[Translate to English:] HZB/M. Setzpfandt") [Translate to English:] HZB/M. Setzpfandt
Transfer – StoriesIn these times of fake news and pseudo-scientific publications, many people find it difficult to distinguish legitimate from dubious content. Only 54%…→
[Translate to English:] HZB/M. Setzpfandt
Transfer – StoriesIn these times of fake news and pseudo-scientific publications, many people find it difficult to distinguish legitimate from dubious content. Only 54%…→"Science needs to make us curious" | 11.06.2019
-
Transfer – Stories
![[Translate to English:]](/fileadmin/_processed_/0/7/csm_Car2CarEnergySharing_Tim_Landgraf_558x314_485bf716e9.jpg "[Translate to English:] Tim Landgraf") [Translate to English:] Tim Landgraf
Transfer – StoriesBrain City Berlin is considered one of the leading locations in Germany working on artificial intelligence. About 30% of all German AI companies are…→
[Translate to English:] Tim Landgraf
Transfer – StoriesBrain City Berlin is considered one of the leading locations in Germany working on artificial intelligence. About 30% of all German AI companies are…→Fish, bees, and self-driving cars | 07.06.2019
-
Transfer – Stories
![[Translate to English:]](/fileadmin/_processed_/b/6/csm_Open-Access_Berlin-Partner_Wu__stenhagen_558x314_dd0c6e714d.jpg "[Translate to English:]") [Translate to English:]
Transfer – StoriesScience and cultural heritage, freely accessible to everyone at any time on the Internet: The Open Access movement is promoting a paradigm shift in…→
[Translate to English:]
Transfer – StoriesScience and cultural heritage, freely accessible to everyone at any time on the Internet: The Open Access movement is promoting a paradigm shift in…→Knowledge for All - Open Access in Berlin | 28.03.2019
-
Transfer – Stories
![[Translate to English:]](/fileadmin/_processed_/6/d/csm_Museum_fu___er_Naturkunde_Berlin_Thomas_Rosenthal_f11b8ba056.jpg "[Translate to English:] Thomas Rosenthal - Museum für Naturkunde Berlin") [Translate to English:] Thomas Rosenthal - Museum für Naturkunde Berlin
Transfer – Stories660 million euros in 10 years: The Natural History Museum Berlin - Museum für Naturkunde Berlin receives financial support for the further development…→
[Translate to English:] Thomas Rosenthal - Museum für Naturkunde Berlin
Transfer – Stories660 million euros in 10 years: The Natural History Museum Berlin - Museum für Naturkunde Berlin receives financial support for the further development…→Future of the Museum für Naturkunde Berlin | 14.01.2019
-
Transfer – Stories
![[Translate to English:]](/fileadmin/_processed_/f/c/csm_TU_Berlin_Cem_Avsar_558x314_4b07bcb055.jpg "[Translate to English:]") [Translate to English:]
Transfer – StoriesSpace exploration is experiencing a revolution thanks to commercialization by such companies as Elon Musk's SpaceX. But did you know that more facets…→
[Translate to English:]
Transfer – StoriesSpace exploration is experiencing a revolution thanks to commercialization by such companies as Elon Musk's SpaceX. But did you know that more facets…→From Berlin to the moon: the space industry is booming in Berlin | 03.09.2018